V4L2摄像头抓图实现
本章节将讲解如何使用 Video4Linux2 (V4L2) 框架来捕获CVBS摄像头图像。
硬件与软件准备
学习之前,先做好以下准备。
- 硬件:T113i-Industrial 开发板
- 硬件:typeC线 X2
- 硬件:cvbs摄像头
- 软件:全志线刷工具:AllwinnertechPhoeniSuit
- 软件:全志USB烧录驱动:AllwinnerUSBFlashDeviceDriver
- 软件:镜像(支持tvd):t113_i_linux_evb1_auto_uart0.img
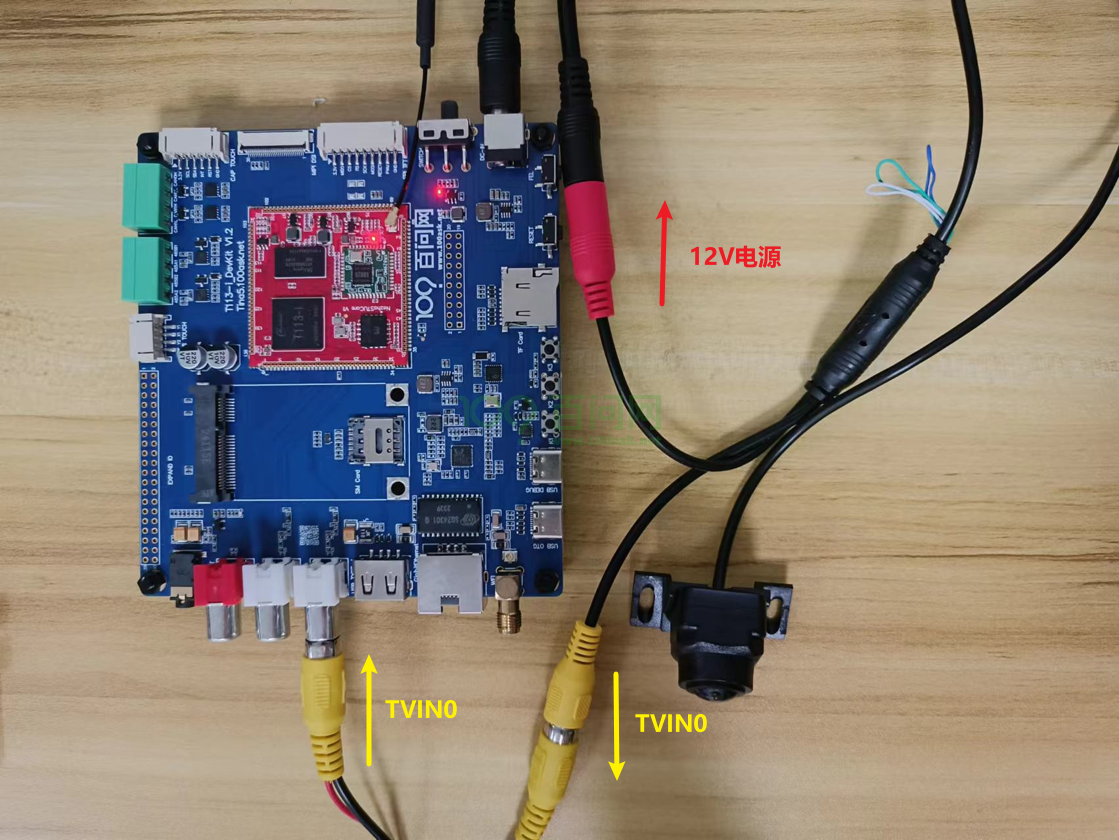
硬件连接指南
先把摄像头接上,下面图片是将cvbs摄像头连接到 T113i-Industrial 开发板的指南。
TVD驱动框架
CVBS摄像头连接的模块是TVD硬件模块,也叫TVIN模块。它负责接收CVBS信号并将其解码为可显示的视频格式。
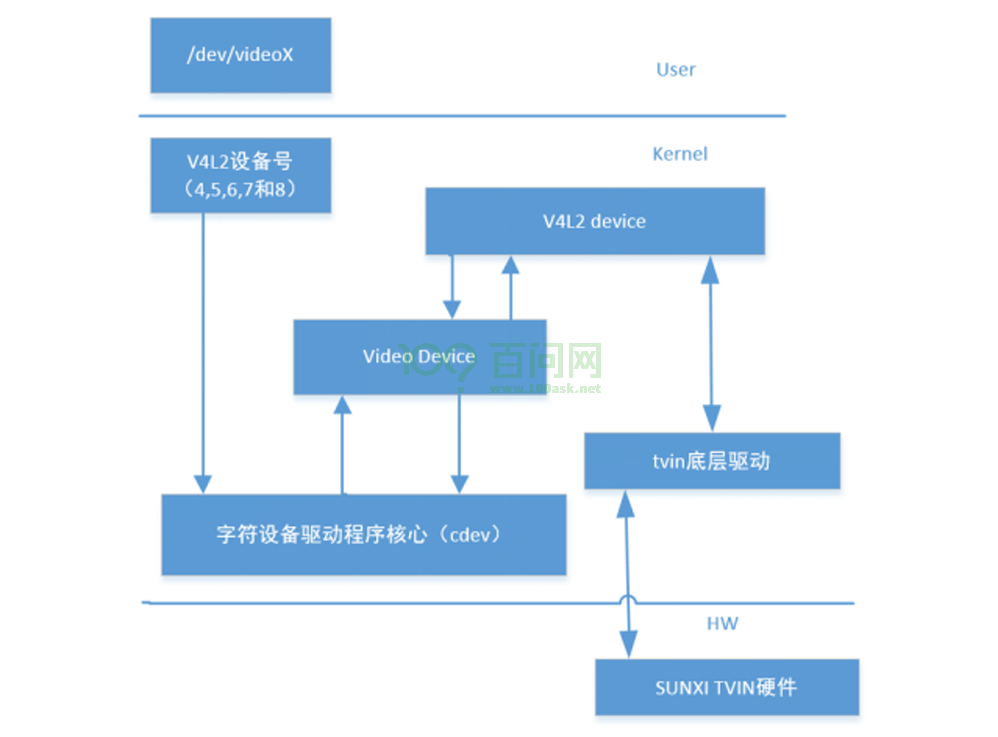
由上图可以知道,TVD 驱动只是负责把 TVD 的硬件描述完成并注册进 V4L2 框架,所以并不需要关心TVD驱动,具体还是放在用户态 的应用层,基于V4L2的框架去编程,实现抓图功能。
抓图流程
接下来,将讲解基于V4L2的框架去编程实现抓图的流程
什么是V4L2框架
V4L2(Video for Linux 2)框架是 Linux 内核中用于处理视频设备的一套 API 和驱动程序框架。它提供了对视频设备的统一访问接口,使得应用程序能够方便地捕获和处理视频数据。
打开设备
一般,当摄像头插入开发板上,在/dev目录里,会出现相应的video节点,但是这里即使摄像头没有插上,也会出现相应的/dev/video节点,因为,芯片已经集成了TVIN硬件模块。
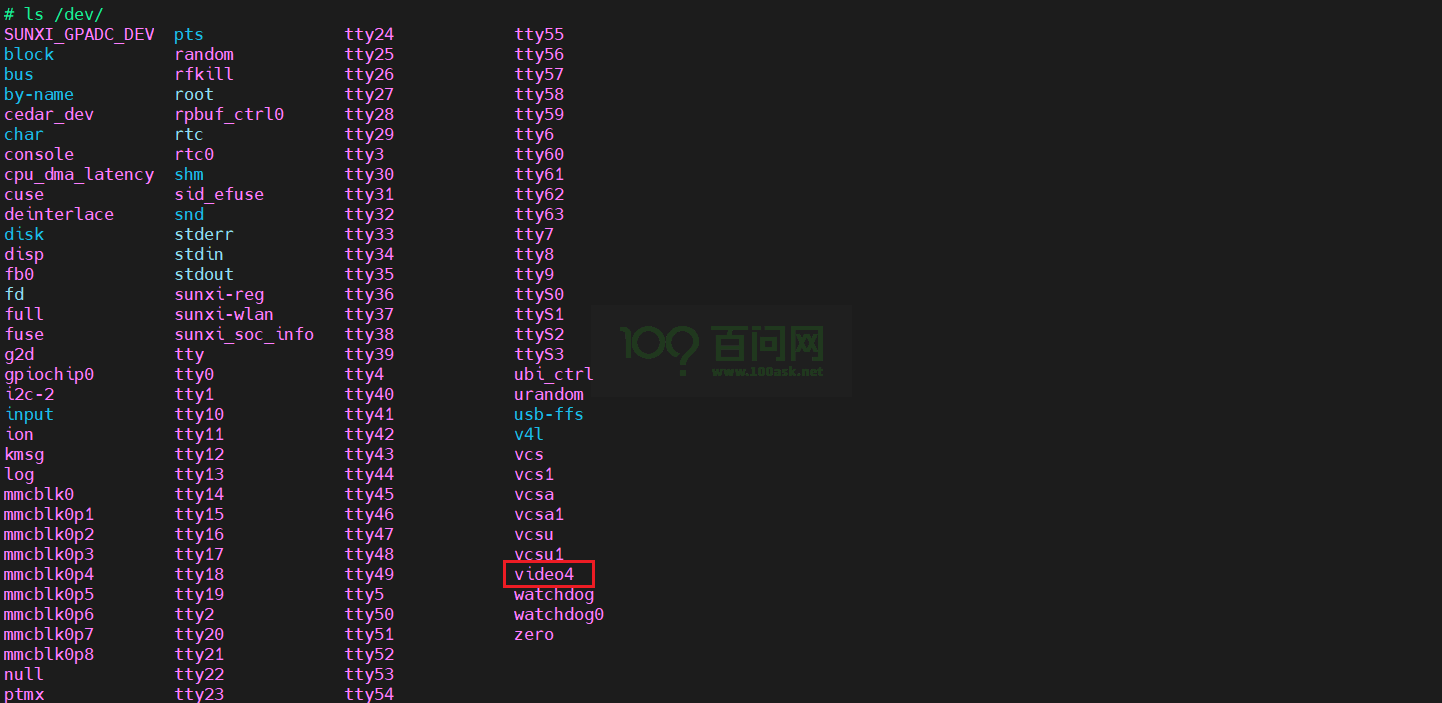
确定了摄像头设备节点/dev/video4,接下来一步步写程序,先打开设备。
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <sys/time.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <time.h>
#include <linux/videodev2.h>
#include <pthread.h>
#include <semaphore.h>
#include <ctype.h>
#include <errno.h>
#include <stdio.h>
int main()
{
/*open /dev/video4*/
int fd = open("/dev/video4",O_RDWR);
if (fd < 0)
{
perror("open /dev/video4 error");
return -1;
}
close(fd);
printf("> closed /dev/video4\n");
return 0;
}
获取支持格式
打开设备成功后,想知道这个摄像头所支持的格式有哪些,这里需要用到 ioctl 函数,传入 VIDIOC_ENUM_FMT 命令,得到的信息将会保存在结构体 struct v4l2_fmtdesc 里,v4l2_fmtdesc 成员如下:
index: 格式编号索引,用于枚举设备支持的多个格式。type: 缓冲区类型,通常设置为V4L2_BUF_TYPE_VIDEO_CAPTURE。flags: 格式描述标志。description: 一个字符串数组,用于存储格式的描述信息。pixelformat: 表示图像格式的四字符代码(fourcc),如V4L2_PIX_FMT_YUYV。reserved: 保留字段,用于未来扩展。
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <sys/time.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <time.h>
#include <linux/videodev2.h>
#include <pthread.h>
#include <semaphore.h>
#include <ctype.h>
#include <errno.h>
#include <stdio.h>
int main()
{
struct v4l2_fmtdesc fmtdesc;
/*open /dev/video4*/
int fd = open("/dev/video4",O_RDWR);
if (fd < 0)
{
perror("open /dev/video4 error");
return -1;
}
/*Enumerate Camera Formats*/
memset(&fmtdesc, 0, sizeof(fmtdesc));
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int i = 0;
while(1) //从0开始测试index索引值
{
fmtdesc.index = i;
i++;
int ret = ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc);
if (ret < 0)
{
perror(" fmtdesc error");
break;
}
printf("> index=%d\n",fmtdesc.index);
printf("> flags=%d\n",fmtdesc.flags);
printf("> discription=%s\n",fmtdesc.description);
unsigned char *p = (unsigned char *)&fmtdesc.pixelformat;
printf("> pixelformat=%c%c%c%c\n",p[0],p[1],p[2],p[3]);
printf("> reserved=%d\n",fmtdesc.reserved[0]);
}
close(fd);
printf("> closed /dev/video4\n");
return 0;
}
运行结果如下:
> index=0
> flags=0
> discription=Y/CbCr 4:2:0
> pixelformat=NV12
> reserved=0
> index=1
> flags=0
> discription=Y/CrCb 4:2:0
> pixelformat=NV21
> reserved=0
> index=2
> flags=0
> discription=Y/CbCr 4:2:2
> pixelformat=NV16
> reserved=0
> index=3
> flags=0
> discription=Y/CrCb 4:2:2
> pixelformat=NV61
> reserved=0
> index=4
> flags=0
> discription=planar PACK
> pixelformat=
> reserved=0
fmtdesc error: Invalid argument
说明这个摄像头支持四种格式。
查询设备能力
我们还可以使用 VIDIOC_QUERYCAP 指令,配合 ioctl 函数,查询视频设备有哪些能力和特性,这些信息保存在结构体 v4l2_capability 里,该结构体的成员如下:
driver[16]:驱动模块的名称,例如 "bttv"。card[32]:设备卡的名称,例如 "Hauppauge WinTV"。bus_info[32]:总线信息,例如 "PCI:" 加上 PCI 设备的名称。version:内核版本。capabilities:设备的整体能力,例如是否支持视频捕获V4L2_CAP_VIDEO_CAPTURE或视频输出V4L2_CAP_VIDEO_OUTPUT。device_caps:通过特定设备(节点)访问的能力。reserved[3]:保留字段。
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <sys/time.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <time.h>
#include <linux/videodev2.h>
#include <pthread.h>
#include <semaphore.h>
#include <ctype.h>
#include <errno.h>
#include <stdio.h>
int main()
{
struct v4l2_fmtdesc fmtdesc;
struct v4l2_capability cap;
/*open /dev/video4*/
int fd = open("/dev/video4",O_RDWR);
if (fd < 0)
{
perror("open /dev/video4 error");
return -1;
}
/*Enumerate Camera Formats*/
memset(&fmtdesc, 0, sizeof(fmtdesc));
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int i = 0;
while(1) //从0开始测试index索引值
{
fmtdesc.index = i;
i++;
int ret = ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc);
if (ret < 0)
{
perror(" fmtdesc error");
break;
}
printf("> index=%d\n",fmtdesc.index);
printf("> flags=%d\n",fmtdesc.flags);
printf("> discription=%s\n",fmtdesc.description);
unsigned char *p = (unsigned char *)&fmtdesc.pixelformat;
printf("> pixelformat=%c%c%c%c\n",p[0],p[1],p[2],p[3]);
printf("> reserved=%d\n",fmtdesc.reserved[0]);
}
/*query device capabilities*/
memset(&cap, 0, sizeof(cap));
if (ioctl(fd, VIDIOC_QUERYCAP, &cap) < 0) {
printf(" Query device capabilities fail!!!\n");
} else {
printf("> Querey device capabilities succeed\n");
printf("> cap.driver=%s\n", cap.driver);
printf("> cap.card=%s\n", cap.card);
printf("> cap.bus_info=%s\n", cap.bus_info);
printf("> cap.version=0x%08x\n", cap.version);
printf("> cap.capabilities=0x%08x\n", cap.capabilities);
}
if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) >= 0) {
printf("> The device is supports the Video Capture interface V4L2_CAP_VIDEO_CAPTURE!!!\n");
}
close(fd);
printf("> closed /dev/video4\n");
return 0;
}
运行结果如下:
> index=0
> flags=0
> discription=Y/CbCr 4:2:0
> pixelformat=NV12
> reserved=0
> index=1
> flags=0
> discription=Y/CrCb 4:2:0
> pixelformat=NV21
> reserved=0
> index=2
> flags=0
> discription=Y/CbCr 4:2:2
> pixelformat=NV16
> reserved=0
> index=3
> flags=0
> discription=Y/CrCb 4:2:2
> pixelformat=NV61
> reserved=0
> index=4
> flags=0
> discription=planar PACK
> pixelformat=
> reserved=0
fmtdesc error: Invalid argument
> Querey device capabilities succeed
> cap.driver=sunxi-tvd
> cap.card=sunxi-tvd
> cap.bus_info=tvd_v4l2_dev0
> cap.version=0x00010000
> cap.capabilities=0x85200001
> The device is supports the Video Capture interface V4L2_CAP_VIDEO_CAPTURE!!!
如果只是简单抓一下图,这一步可以不用操作。
配置摄像头
我们要实现的功能是抓图,这个摄像头的输入源,应该设置为相机类型,把参数存到结构体 v4l2_input 里 ,使用 VIDIOC_S_INPUT 命令设置视频设备的视频输入源。
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <sys/time.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <time.h>
#include <linux/videodev2.h>
#include <pthread.h>
#include <semaphore.h>
#include <ctype.h>
#include <errno.h>
#include <stdio.h>
int main()
{
struct v4l2_fmtdesc fmtdesc;
struct v4l2_capability cap;
struct v4l2_input inp;
/*open /dev/video4*/
int fd = open("/dev/video4",O_RDWR);
if (fd < 0)
{
perror("open /dev/video4 error");
return -1;
}
/*enumerate Camera Formats*/
memset(&fmtdesc, 0, sizeof(fmtdesc));
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int i = 0;
while(1) //从0开始测试index索引值
{
fmtdesc.index = i;
i++;
int ret = ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc);
if (ret < 0)
{
perror(" fmtdesc error");
break;
}
printf("> index=%d\n",fmtdesc.index);
printf("> flags=%d\n",fmtdesc.flags);
printf("> discription=%s\n",fmtdesc.description);
unsigned char *p = (unsigned char *)&fmtdesc.pixelformat;
printf("> pixelformat=%c%c%c%c\n",p[0],p[1],p[2],p[3]);
printf("> reserved=%d\n",fmtdesc.reserved[0]);
}
/*query device capabilities*/
memset(&cap, 0, sizeof(cap));
if (ioctl(fd, VIDIOC_QUERYCAP, &cap) < 0) {
printf(" Query device capabilities fail!!!\n");
} else {
printf("> Querey device capabilities succeed\n");
printf("> cap.driver=%s\n", cap.driver);
printf("> cap.card=%s\n", cap.card);
printf("> cap.bus_info=%s\n", cap.bus_info);
printf("> cap.version=0x%08x\n", cap.version);
printf("> cap.capabilities=0x%08x\n", cap.capabilities);
}
if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) >= 0) {
printf("> The device is supports the Video Capture interface V4L2_CAP_VIDEO_CAPTURE!!!\n");
}
/*set input source*/
memset(&inp, 0, sizeof(inp));
inp.index = 0; //设置输入索引,通常0是默认输入
inp.type = V4L2_INPUT_TYPE_CAMERA; //设置输入类型,这里是相机
if (ioctl(fd, VIDIOC_S_INPUT, &inp) < 0) {
printf(" VIDIOC_S_INPUT failed! s_input: %d\n", inp.index);
close(fd);
return -1;
}else{
printf("> select the current video input successfully!\n");
}
close(fd);
printf("> closed /dev/video4\n");
return 0;
}
想抓取什么样的图片数据,这需要我们进一步设置相应的格式,把参数储存在结构体 v4l2_format 里,使用 VIDIOC_S_FMT 指令,设置视频捕获设备的视频格式。有哪些参数可以设置呢?
struct v4l2_format {
enum v4l2_buf_type type; // 视频流的类型,如 V4L2_BUF_TYPE_VIDEO_CAPTURE
union {
struct v4l2_pix_format pix; // 图像数据格式(用于图像捕获)
struct v4l2_pix_format_mplane pix_mp; // 多平面图像数据格式(用于图像捕获)
struct v4l2_window win; // 视频窗口(用于视频叠加)
struct v4l2_vbi_format vbi; // VBI 数据格式(用于 VBI 捕获)
struct v4l2_sliced_vbi_format sliced; // 分片 VBI 数据格式(用于分片 VBI 捕获)
__u8 raw_data[200]; // 用于用户定义的格式
} fmt;
};
实现抓图,最主要设置其成员中的结构体 v4l2_pix_format ,其成员有:
struct v4l2_pix_format {
__u32 width; // 图像宽度
__u32 height; // 图像高度
__u32 pixelformat; // 像素格式
__u32 field; // 图像场
__u32 bytesperline; // 每行的字节数
__u32 sizeimage; // 图像的总字节数
__u32 colorspace; // 颜色空间
__u32 priv; // 私有数据
__u32 flags; // 标志
__u32 ycbcr_enc; // YCbCr 编码
__u32 hsv_enc; // HSV 编码
__u32 quantization; // 量化
__u32 xeight; // X 轴的扩展高度
};
添加代码如下:
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <sys/time.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <time.h>
#include <linux/videodev2.h>
#include <pthread.h>
#include <semaphore.h>
#include <ctype.h>
#include <errno.h>
#include <stdio.h>
int main()
{
struct v4l2_fmtdesc fmtdesc;
struct v4l2_capability cap;
struct v4l2_input inp;
struct v4l2_format fmt;
/*open /dev/video4*/
int fd = open("/dev/video4",O_RDWR);
if (fd < 0)
{
perror("open /dev/video4 error");
return -1;
}
/*enumerate Camera Formats*/
memset(&fmtdesc, 0, sizeof(fmtdesc));
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int i = 0;
while(1) //从0开始测试index索引值
{
fmtdesc.index = i;
i++;
int ret = ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc);
if (ret < 0)
{
perror(" fmtdesc error");
break;
}
printf("> index=%d\n",fmtdesc.index);
printf("> flags=%d\n",fmtdesc.flags);
printf("> discription=%s\n",fmtdesc.description);
unsigned char *p = (unsigned char *)&fmtdesc.pixelformat;
printf("> pixelformat=%c%c%c%c\n",p[0],p[1],p[2],p[3]);
printf("> reserved=%d\n",fmtdesc.reserved[0]);
}
/*query device capabilities*/
memset(&cap, 0, sizeof(cap));
if (ioctl(fd, VIDIOC_QUERYCAP, &cap) < 0) {
printf(" Query device capabilities fail!!!\n");
} else {
printf("> Querey device capabilities succeed\n");
printf("> cap.driver=%s\n", cap.driver);
printf("> cap.card=%s\n", cap.card);
printf("> cap.bus_info=%s\n", cap.bus_info);
printf("> cap.version=0x%08x\n", cap.version);
printf("> cap.capabilities=0x%08x\n", cap.capabilities);
}
if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) >= 0) {
printf("> The device is supports the Video Capture interface V4L2_CAP_VIDEO_CAPTURE!!!\n");
}
/*set input source*/
memset(&inp, 0, sizeof(inp));
inp.index = 0; //设置输入索引,通常0是默认输入
inp.type = V4L2_INPUT_TYPE_CAMERA; //设置输入类型,这里是相机
if (ioctl(fd, VIDIOC_S_INPUT, &inp) < 0) {
printf(" VIDIOC_S_INPUT failed! s_input: %d\n", inp.index);
close(fd);
return -1;
}else{
printf("> select the current video input successfully!\n");
}
/*set input format*/
width = 720;
height = 480;
memset(&fmt, 0, sizeof(struct v4l2_format));
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = width;
fmt.fmt.pix.height = height;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_NV21;
fmt.fmt.pix.field = V4L2_FIELD_NONE;
char fourcc[5];
if (ioctl(fd, VIDIOC_S_FMT, &fmt) < 0) {
printf(" setting the data format failed!\n");
close(fd);
return -1;
}else{
printf("> VIDIOC_S_FMT succeed\n");
printf("> fmt.type = %d\n", fmt.type);
printf("> fmt.fmt.pix.width = %d\n", fmt.fmt.pix.width);
printf("> fmt.fmt.pix.height = %d\n", fmt.fmt.pix.height);
printf("> fmt.fmt.pix.field = %d\n", fmt.fmt.pix.field);
sprintf(fourcc, "%c%c%c%c",
((fmt.fmt.pix.pixelformat >> 0) & 0xff),
((fmt.fmt.pix.pixelformat >> 8) & 0xff),
((fmt.fmt.pix.pixelformat >> 16) & 0xff),
((fmt.fmt.pix.pixelformat >> 24) & 0xff));
printf("> The pixel format fourcc is: %s\n", fourcc);
}
close(fd);
printf("> closed /dev/video4\n");
return 0;
}
运行结果:
> index=0
> flags=0
> discription=Y/CbCr 4:2:0
> pixelformat=NV12
> reserved=0
> index=1
> flags=0
> discription=Y/CrCb 4:2:0
> pixelformat=NV21
> reserved=0
> index=2
> flags=0
> discription=Y/CbCr 4:2:2
> pixelformat=NV16
> reserved=0
> index=3
> flags=0
> discription=Y/CrCb 4:2:2
> pixelformat=NV61
> reserved=0
> index=4
> flags=0
> discription=planar PACK
> pixelformat=
> reserved=0
fmtdesc error: Invalid argument
> Querey device capabilities succeed
> cap.driver=sunxi-tvd
> cap.card=sunxi-tvd
> cap.bus_info=tvd_v4l2_dev0
> cap.version=0x00010000
> cap.capabilities=0x85200001
> The device is supports the Video Capture interface V4L2_CAP_VIDEO_CAPTURE!!!
> select the current video input successfully!
> VIDIOC_S_FMT succeed
> fmt.type = 1
> fmt.fmt.pix.width = 720
> fmt.fmt.pix.height = 480
> fmt.fmt.pix.field = 1
> The pixel format fourcc is: NV21
申请内核缓冲区
为了在用户空间和内核空间之间高效地传输数据,使用 VIDIOC_REQBUFS 命令申请内核缓冲区,指定缓冲区的数量、缓冲区的类型和缓冲区的内存类型,这些参数保存在结构体v4l2_requestbuffers 。
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <sys/time.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <time.h>
#include <linux/videodev2.h>
#include <pthread.h>
#include <semaphore.h>
#include <ctype.h>
#include <errno.h>
#include <stdio.h>
int main()
{
struct v4l2_fmtdesc fmtdesc;
struct v4l2_capability cap;
struct v4l2_input inp;
struct v4l2_format fmt;
struct v4l2_requestbuffers req;
/*open /dev/video4*/
int fd = open("/dev/video4",O_RDWR);
if (fd < 0)
{
perror("open /dev/video4 error");
return -1;
}
/*enumerate Camera Formats*/
memset(&fmtdesc, 0, sizeof(fmtdesc));
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int i = 0;
while(1) //从0开始测试index索引值
{
fmtdesc.index = i;
i++;
int ret = ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc);
if (ret < 0)
{
perror(" fmtdesc error");
break;
}
printf("> index=%d\n",fmtdesc.index);
printf("> flags=%d\n",fmtdesc.flags);
printf("> discription=%s\n",fmtdesc.description);
unsigned char *p = (unsigned char *)&fmtdesc.pixelformat;
printf("> pixelformat=%c%c%c%c\n",p[0],p[1],p[2],p[3]);
printf("> reserved=%d\n",fmtdesc.reserved[0]);
}
/*query device capabilities*/
memset(&cap, 0, sizeof(cap));
if (ioctl(fd, VIDIOC_QUERYCAP, &cap) < 0) {
printf(" Query device capabilities fail!!!\n");
} else {
printf("> Querey device capabilities succeed\n");
printf("> cap.driver=%s\n", cap.driver);
printf("> cap.card=%s\n", cap.card);
printf("> cap.bus_info=%s\n", cap.bus_info);
printf("> cap.version=0x%08x\n", cap.version);
printf("> cap.capabilities=0x%08x\n", cap.capabilities);
}
if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) >= 0) {
printf("> The device is supports the Video Capture interface V4L2_CAP_VIDEO_CAPTURE!!!\n");
}
/*set input source*/
memset(&inp, 0, sizeof(inp));
inp.index = 0; //设置输入索引,通常0是默认输入
inp.type = V4L2_INPUT_TYPE_CAMERA; //设置输入类型,这里是相机
if (ioctl(fd, VIDIOC_S_INPUT, &inp) < 0) {
printf(" VIDIOC_S_INPUT failed! s_input: %d\n", inp.index);
close(fd);
return -1;
}else{
printf("> select the current video input successfully!\n");
}
/*set input format*/
width = 720;
height = 480;
memset(&fmt, 0, sizeof(struct v4l2_format));
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = width;
fmt.fmt.pix.height = height;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_NV21;
fmt.fmt.pix.field = V4L2_FIELD_NONE;
char fourcc[5];
if (ioctl(fd, VIDIOC_S_FMT, &fmt) < 0) {
printf(" setting the data format failed!\n");
close(fd);
return -1;
}else{
printf("> VIDIOC_S_FMT succeed\n");
printf("> fmt.type = %d\n", fmt.type);
printf("> fmt.fmt.pix.width = %d\n", fmt.fmt.pix.width);
printf("> fmt.fmt.pix.height = %d\n", fmt.fmt.pix.height);
printf("> fmt.fmt.pix.field = %d\n", fmt.fmt.pix.field);
sprintf(fourcc, "%c%c%c%c",
((fmt.fmt.pix.pixelformat >> 0) & 0xff),
((fmt.fmt.pix.pixelformat >> 8) & 0xff),
((fmt.fmt.pix.pixelformat >> 16) & 0xff),
((fmt.fmt.pix.pixelformat >> 24) & 0xff));
printf("> The pixel format fourcc is: %s\n", fourcc);
}
/*request for a kernel buffer*/
memset(&req, 0, sizeof(struct v4l2_requestbuffers));
req.count = 3; //缓冲区数量
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //缓冲区类型
req.memory = V4L2_MEMORY_MMAP; //缓冲区内存类型
if (ioctl(fd, VIDIOC_REQBUFS, &req) < 0) {
printf("> VIDIOC_REQBUFS failed\n");
close(fd);
return -1;
}else{
printf("> request buffer sccessfully!\n");
}
int buf_count = req.count;
printf("> buf_count is : %d\n",buf_count);
close(fd);
printf("> closed /dev/video4\n");
return 0;
}
成功申请到内核buffer:
> index=0
> flags=0
> discription=Y/CbCr 4:2:0
> pixelformat=NV12
> reserved=0
> index=1
> flags=0
> discription=Y/CrCb 4:2:0
> pixelformat=NV21
> reserved=0
> index=2
> flags=0
> discription=Y/CbCr 4:2:2
> pixelformat=NV16
> reserved=0
> index=3
> flags=0
> discription=Y/CrCb 4:2:2
> pixelformat=NV61
> reserved=0
> index=4
> flags=0
> discription=planar PACK
> pixelformat=
> reserved=0
fmtdesc error: Invalid argument
> Querey device capabilities succeed
> cap.driver=sunxi-tvd
> cap.card=sunxi-tvd
> cap.bus_info=tvd_v4l2_dev0
> cap.version=0x00010000
> cap.capabilities=0x85200001
> The device is supports the Video Capture interface V4L2_CAP_VIDEO_CAPTURE!!!
> select the current video input successfully!
> VIDIOC_S_FMT succeed
> fmt.type = 1
> fmt.fmt.pix.width = 720
> fmt.fmt.pix.height = 480
> fmt.fmt.pix.field = 1
> The pixel format fourcc is: NV21
> request buffer sccessfully!
> buf_count is : 3
映射内核缓冲区
请求内核缓冲区成功后,需要为每个请求的缓冲区进行初始化,包括查询缓冲区信息,内存映射和排队缓冲区。这是抓图过程中的一个重要步骤,确保缓冲区准备好并可以被内核使用。
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <sys/time.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <time.h>
#include <linux/videodev2.h>
#include <pthread.h>
#include <semaphore.h>
#include <ctype.h>
#include <errno.h>
#include <stdio.h>
struct buffer{
unsigned char *start[3];
unsigned int length[3];
};
int main()
{
struct v4l2_fmtdesc fmtdesc;
struct v4l2_capability cap;
struct v4l2_input inp;
struct v4l2_format fmt;
struct v4l2_requestbuffers req;
struct v4l2_buffer buf;
/*open /dev/video4*/
int fd = open("/dev/video4",O_RDWR);
if (fd < 0)
{
perror("open /dev/video4 error");
return -1;
}
/*enumerate Camera Formats*/
memset(&fmtdesc, 0, sizeof(fmtdesc));
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int i = 0;
while(1) //从0开始测试index索引值
{
fmtdesc.index = i;
i++;
int ret = ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc);
if (ret < 0)
{
perror(" fmtdesc error");
break;
}
printf("> index=%d\n",fmtdesc.index);
printf("> flags=%d\n",fmtdesc.flags);
printf("> discription=%s\n",fmtdesc.description);
unsigned char *p = (unsigned char *)&fmtdesc.pixelformat;
printf("> pixelformat=%c%c%c%c\n",p[0],p[1],p[2],p[3]);
printf("> reserved=%d\n",fmtdesc.reserved[0]);
}
/*query device capabilities*/
memset(&cap, 0, sizeof(cap));
if (ioctl(fd, VIDIOC_QUERYCAP, &cap) < 0) {
printf(" Query device capabilities fail!!!\n");
} else {
printf("> Querey device capabilities succeed\n");
printf("> cap.driver=%s\n", cap.driver);
printf("> cap.card=%s\n", cap.card);
printf("> cap.bus_info=%s\n", cap.bus_info);
printf("> cap.version=0x%08x\n", cap.version);
printf("> cap.capabilities=0x%08x\n", cap.capabilities);
}
if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) >= 0) {
printf("> The device is supports the Video Capture interface V4L2_CAP_VIDEO_CAPTURE!!!\n");
}
/*set input source*/
memset(&inp, 0, sizeof(inp));
inp.index = 0; //设置输入索引,通常0是默认输入
inp.type = V4L2_INPUT_TYPE_CAMERA; //设置输入类型,这里是相机
if (ioctl(fd, VIDIOC_S_INPUT, &inp) < 0) {
printf(" VIDIOC_S_INPUT failed! s_input: %d\n", inp.index);
close(fd);
return -1;
}else{
printf("> select the current video input successfully!\n");
}
/*set input format*/
width = 720;
height = 480;
memset(&fmt, 0, sizeof(struct v4l2_format));
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = width;
fmt.fmt.pix.height = height;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_NV21;
fmt.fmt.pix.field = V4L2_FIELD_NONE;
char fourcc[5];
if (ioctl(fd, VIDIOC_S_FMT, &fmt) < 0) {
printf(" setting the data format failed!\n");
close(fd);
return -1;
}else{
printf("> VIDIOC_S_FMT succeed\n");
printf("> fmt.type = %d\n", fmt.type);
printf("> fmt.fmt.pix.width = %d\n", fmt.fmt.pix.width);
printf("> fmt.fmt.pix.height = %d\n", fmt.fmt.pix.height);
printf("> fmt.fmt.pix.field = %d\n", fmt.fmt.pix.field);
sprintf(fourcc, "%c%c%c%c",
((fmt.fmt.pix.pixelformat >> 0) & 0xff),
((fmt.fmt.pix.pixelformat >> 8) & 0xff),
((fmt.fmt.pix.pixelformat >> 16) & 0xff),
((fmt.fmt.pix.pixelformat >> 24) & 0xff));
printf("> The pixel format fourcc is: %s\n", fourcc);
}
/*request for a kernel buffer*/
memset(&req, 0, sizeof(struct v4l2_requestbuffers));
req.count = 3; //缓冲区数量
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //缓冲区类型
req.memory = V4L2_MEMORY_MMAP; //缓冲区内存类型
if (ioctl(fd, VIDIOC_REQBUFS, &req) < 0) {
printf("> VIDIOC_REQBUFS failed\n");
close(fd);
return -1;
}else{
printf("> request buffer sccessfully!\n");
}
int buf_count = req.count;
printf("> buf_count is : %d\n",buf_count);
/*map kernel buffer*/
struct buffer *buffers = calloc(buf_count,sizeof(struct buffer));
for(i = 0; i < buf_count; i++)
{
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.index = i;
buf.memory = V4L2_MEMORY_MMAP;
if(ioctl(fd, VIDIOC_QUERYBUF, &buf) == -1)
{
printf("> VIDIOC_QUERYBUF error\n");
free(buffers);
close(fd);
return -1;
}
buffers[i].length[0] = buf.length;
buffers[i].start[0] = (unsigned char *)mmap(NULL ,buf.length ,PROT_READ | PROT_WRITE ,MAP_SHARED ,fd ,buf.m.offset);
printf("> map buffer index: %d, mem: %p, len: %x, offset: %x\n", \
i, buffers[i].start[0], buf.length, buf.m.offset);
if(ioctl(fd,VIDIOC_QBUF,&buf) < 0)
{
printf("> Failed to queue buf\n");
}
}
close(fd);
printf("> closed /dev/video4\n");
return 0;
}
成功运行如下:
> index=0
> flags=0
> discription=Y/CbCr 4:2:0
> pixelformat=NV12
> reserved=0
> index=1
> flags=0
> discription=Y/CrCb 4:2:0
> pixelformat=NV21
> reserved=0
> index=2
> flags=0
> discription=Y/CbCr 4:2:2
> pixelformat=NV16
> reserved=0
> index=3
> flags=0
> discription=Y/CrCb 4:2:2
> pixelformat=NV61
> reserved=0
> index=4
> flags=0
> discription=planar PACK
> pixelformat=
> reserved=0
fmtdesc error: Invalid argument
> Querey device capabilities succeed
> cap.driver=sunxi-tvd
> cap.card=sunxi-tvd
> cap.bus_info=tvd_v4l2_dev0
> cap.version=0x00010000
> cap.capabilities=0x85200001
> The device is supports the Video Capture interface V4L2_CAP_VIDEO_CAPTURE!!!
> select the current video input successfully!
> VIDIOC_S_FMT succeed
> fmt.type = 1
> fmt.fmt.pix.width = 720
> fmt.fmt.pix.height = 480
> fmt.fmt.pix.field = 1
> The pixel format fourcc is: NV21
> request buffer sccessfully!
> buf_count is : 3
> map buffer index: 0, mem: 0xb6e0b000, len: 7e900, offset: 0
> map buffer index: 1, mem: 0xb6d8c000, len: 7e900, offset: 7f000
> map buffer index: 2, mem: 0xb6d0d000, len: 7e900, offset: fe000
采集数据
做好以上相应的准备后,我们就可以去采集每一帧的数据,一帧通常指的是视频流中的单个静态图像,可以被视为一张图片。
采集的流程:
- VIDIOC_STREAMON :开始采集数据到缓冲区
- VIDIOC_DQBUF :获取一个采集完数据的缓冲区(没采集完时,这个过程会阻塞,直到采集完毕)
- VIDIOC_QBUF :将一个缓冲区标记为空闲并重新排队
- VIDIOC_STREAMOFF :清除所有当前排队的缓冲区,并停止设备的数据流
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <sys/time.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <time.h>
#include <linux/videodev2.h>
#include <pthread.h>
#include <semaphore.h>
#include <ctype.h>
#include <errno.h>
#include <stdio.h>
#include "convert.h"
struct buffer{
unsigned char *start[3];
unsigned int length[3];
};
static long long secs_to_msecs(long secs, long usecs)
{
long long msecs;
msecs = ((long long)usecs) / 1000 + ((long long)secs) * 1000;
return msecs;
}
int main()
{
struct v4l2_fmtdesc fmtdesc;
struct v4l2_capability cap;
struct v4l2_input inp;
struct v4l2_format fmt;
struct v4l2_requestbuffers req;
struct v4l2_buffer buf;
/*open /dev/video4*/
int fd = open("/dev/video4",O_RDWR);
if (fd < 0)
{
perror("open /dev/video4 error");
return -1;
}
/*enumerate Camera Formats*/
memset(&fmtdesc, 0, sizeof(fmtdesc));
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int i = 0;
while(1) //从0开始测试index索引值
{
fmtdesc.index = i;
i++;
int ret = ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc);
if (ret < 0)
{
perror(" fmtdesc error");
break;
}
printf("> index=%d\n",fmtdesc.index);
printf("> flags=%d\n",fmtdesc.flags);
printf("> discription=%s\n",fmtdesc.description);
unsigned char *p = (unsigned char *)&fmtdesc.pixelformat;
printf("> pixelformat=%c%c%c%c\n",p[0],p[1],p[2],p[3]);
printf("> reserved=%d\n",fmtdesc.reserved[0]);
}
/*query device capabilities*/
memset(&cap, 0, sizeof(cap));
if (ioctl(fd, VIDIOC_QUERYCAP, &cap) < 0) {
printf(" Query device capabilities fail!!!\n");
} else {
printf("> Querey device capabilities succeed\n");
printf("> cap.driver=%s\n", cap.driver);
printf("> cap.card=%s\n", cap.card);
printf("> cap.bus_info=%s\n", cap.bus_info);
printf("> cap.version=0x%08x\n", cap.version);
printf("> cap.capabilities=0x%08x\n", cap.capabilities);
}
if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) >= 0) {
printf("> The device is supports the Video Capture interface V4L2_CAP_VIDEO_CAPTURE!!!\n");
}
/*set input source*/
memset(&inp, 0, sizeof(inp));
inp.index = 0; //设置输入索引,通常0是默认输入
inp.type = V4L2_INPUT_TYPE_CAMERA; //设置输入类型,这里是相机
if (ioctl(fd, VIDIOC_S_INPUT, &inp) < 0) {
printf(" VIDIOC_S_INPUT failed! s_input: %d\n", inp.index);
close(fd);
return -1;
}else{
printf("> select the current video input successfully!\n");
}
/*set input format*/
width = 720;
height = 480;
memset(&fmt, 0, sizeof(struct v4l2_format));
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = width;
fmt.fmt.pix.height = height;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_NV21;
fmt.fmt.pix.field = V4L2_FIELD_NONE;
char fourcc[5];
if (ioctl(fd, VIDIOC_S_FMT, &fmt) < 0) {
printf(" setting the data format failed!\n");
close(fd);
return -1;
}else{
printf("> VIDIOC_S_FMT succeed\n");
printf("> fmt.type = %d\n", fmt.type);
printf("> fmt.fmt.pix.width = %d\n", fmt.fmt.pix.width);
printf("> fmt.fmt.pix.height = %d\n", fmt.fmt.pix.height);
printf("> fmt.fmt.pix.field = %d\n", fmt.fmt.pix.field);
sprintf(fourcc, "%c%c%c%c",
((fmt.fmt.pix.pixelformat >> 0) & 0xff),
((fmt.fmt.pix.pixelformat >> 8) & 0xff),
((fmt.fmt.pix.pixelformat >> 16) & 0xff),
((fmt.fmt.pix.pixelformat >> 24) & 0xff));
printf("> The pixel format fourcc is: %s\n", fourcc);
}
/*request for a kernel buffer*/
memset(&req, 0, sizeof(struct v4l2_requestbuffers));
req.count = 3; //缓冲区数量
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //缓冲区类型
req.memory = V4L2_MEMORY_MMAP; //缓冲区内存类型
if (ioctl(fd, VIDIOC_REQBUFS, &req) < 0) {
printf("> VIDIOC_REQBUFS failed\n");
close(fd);
return -1;
}else{
printf("> request buffer sccessfully!\n");
}
int buf_count = req.count;
printf("> buf_count is : %d\n",buf_count);
/*map kernel buffer*/
struct buffer *buffers = calloc(buf_count,sizeof(struct buffer));
for(i = 0; i < buf_count; i++)
{
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.index = i;
buf.memory = V4L2_MEMORY_MMAP;
if(ioctl(fd, VIDIOC_QUERYBUF, &buf) == -1)
{
printf("> VIDIOC_QUERYBUF error\n");
free(buffers);
close(fd);
return -1;
}
buffers[i].length[0] = buf.length;
buffers[i].start[0] = (unsigned char *)mmap(NULL ,buf.length ,PROT_READ | PROT_WRITE ,MAP_SHARED ,fd ,buf.m.offset);
printf("> map buffer index: %d, mem: %p, len: %x, offset: %x\n", \
i, buffers[i].start[0], buf.length, buf.m.offset);
if(ioctl(fd,VIDIOC_QBUF,&buf) < 0)
{
printf("> Failed to queue buf\n");
}
}
/*capture screenshot*/
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
/*1.VIDIOC_STREAMON*/
if (ioctl(fd, VIDIOC_STREAMON, &type) == -1) {
printf("> VIDIOC_STREAMON error! %s\n", strerror(errno));
goto EXIT;
} else
printf(" stream on succeed\n");
gettimeofday(&tv, NULL);
long long streamon_time = secs_to_msecs(tv.tv_sec, tv.tv_usec);
memset(&buf, 0, sizeof(struct v4l2_buffer));
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
int np = 0;
int ret = 0;
long long timestamp_now, timestamp_save;
char bmp_data_path[128];
fd_set fds;
while(np < 5)
{
printf("> camera%d capture num is [%d]\n", 1, np);
tv.tv_sec = 2;
tv.tv_usec = 0;
FD_ZERO(&fds);
FD_SET(fd, &fds);
ret = select(fd + 1, &fds, NULL, NULL, &tv);
if (ret == -1) {
printf("> select error\n");
continue;
} else if (ret == 0) {
printf("> camera%d select timeout,end capture thread!\n", np);
ret = -1;
break;
}
/*2.VIDIOC_DQBUF*/
ret = ioctl(fd, VIDIOC_DQBUF, &buf);
if (ret == 0)
printf("*****DQBUF[%d] FINISH*****\n", buf.index);
else
printf("****DQBUF FAIL*****\n");
gettimeofday(&tv, NULL);
timestamp_now = secs_to_msecs(tv.tv_sec, tv.tv_usec);
if (np == 0) {
printf("> the time interval from the start to the first frame is %lld ms\n", timestamp_now - streamon_time);
timestamp_save = timestamp_now;
}
printf("> the interval of two frames is %lld ms\n", timestamp_now - timestamp_save);
timestamp_save = timestamp_now;
sprintf(bmp_data_path, "%s/bmp_%s_%d.bmp", "/mnt/UDISK", "NV21", np + 1);
printf("> buf.index = %d\n",buf.index);
YUVToBMP(bmp_data_path,buffers[buf.index].start[0],NV21ToRGB24,width,height);
/*3.VIDIOC_QBUF*/
if (ioctl(fd, VIDIOC_QBUF, &buf) == 0)
printf("************QBUF[%d] FINISH**************\n", buf.index);
else
printf("*****QBUF FAIL*****\n");
np++;
}
/*4.VIDIOC_STREAMOFF*/
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if (ioctl(fd, VIDIOC_STREAMOFF, &type) == -1)
printf("> VIDIOC_STREAMOFF error! %s\n", strerror(errno));
EXIT:
for (i = 0; i < buf_count; i++) {
if (munmap(buffers[i].start[0], buffers[i].length[0]) == -1) {
printf("> munmap error\n");
return -1;
}
}
close(fd);
printf("> closed /dev/video4\n");
return 0;
}
上面一共抓取5张图片,图片保存在/mnt/UDISK/,还加入了抓取一张图片需要多少时间的功能,并且把YUV格式的数据转换为BMP图像等处理,具体代码查看源码。
> index=0
> flags=0
> discription=Y/CbCr 4:2:0
> pixelformat=NV12
> reserved=0
> index=1
> flags=0
> discription=Y/CrCb 4:2:0
> pixelformat=NV21
> reserved=0
> index=2
> flags=0
> discription=Y/CbCr 4:2:2
> pixelformat=NV16
> reserved=0
> index=3
> flags=0
> discription=Y/CrCb 4:2:2
> pixelformat=NV61
> reserved=0
> index=4
> flags=0
> discription=planar PACK
> pixelformat=
> reserved=0
fmtdesc error: Invalid argument
> Querey device capabilities succeed
> cap.driver=sunxi-tvd
> cap.card=sunxi-tvd
> cap.bus_info=tvd_v4l2_dev0
> cap.version=0x00010000
> cap.capabilities=0x85200001
> The device is supports the Video Capture interface V4L2_CAP_VIDEO_CAPTURE!!!
> select the current video input successfully!
> VIDIOC_S_FMT succeed
> fmt.type = 1
> fmt.fmt.pix.width = 720
> fmt.fmt.pix.height = 480
> fmt.fmt.pix.field = 1
> The pixel format fourcc is: NV21
> request buffer sccessfully!
> buf_count is : 3
> map buffer index: 0, mem: 0xb6e0b000, len: 7e900, offset: 0
> map buffer index: 1, mem: 0xb6d8c000, len: 7e900, offset: 7f000
> map buffer index: 2, mem: 0xb6d0d000, len: 7e900, offset: fe000
stream on succeed
> camera1 capture num is [0]
*****DQBUF[0] FINISH*****
> the time interval from the start to the first frame is 76 ms
> the interval of two frames is 0 ms
> buf.index = 0
************QBUF[0] FINISH**************
> camera1 capture num is [1]
*****DQBUF[1] FINISH*****
> the interval of two frames is 390 ms
> buf.index = 1
************QBUF[1] FINISH**************
> camera1 capture num is [2]
*****DQBUF[2] FINISH*****
> the interval of two frames is 390 ms
> buf.index = 2
************QBUF[2] FINISH**************
> camera1 capture num is [3]
*****DQBUF[0] FINISH*****
> the interval of two frames is 389 ms
> buf.index = 0
************QBUF[0] FINISH**************
> camera1 capture num is [4]
*****DQBUF[1] FINISH*****
> the interval of two frames is 390 ms
> buf.index = 1
************QBUF[1] FINISH**************
> closed /dev/video4
源码使用方法
以上,讲解了抓图的流程,只要你的摄像头适配了v4l2驱动框架,上面的流程基本都适用。下面将讲解如何获取本次例程的源码。
进入Ubuntu,获取资源:
git clone https://e.coding.net/weidongshan/tina5/APP-DevExample.git
下载的资源里面,源码在文件夹 V4L2/camera_capture_demo_v1。
ubuntu@dshanpi:~/meihao/APP-DevExample/V4L2/camera_capture_demo_v1$ tree
.
├── build.sh
├── cameratest
├── cameratest.c
├── convert.c
├── convert.h
└── README.md
0 directories, 6 files
这个文件夹下的README.md 里面有讲解怎么去编译。接下来讲解如何使用这个 cameratest 应用程序,其实很简单。
把 cameratest 应用程序通过 ADB 工具上传到开发板的 /mnt/UDISK/ 目录下,
adb push cameratest /mnt/UDISK/
登录开发板。如果不清楚怎么去登录开发板终端,请参考:启动开发板 | 东山Π (100ask.org)
在开发板终端上,执行以下指令:
/mnt/UDSIK/cameratest
这个程序默认抓取5张图片(如果需要修改抓图数量,根据上面代码修改),图片保存的路径是/mnt/UDISK/
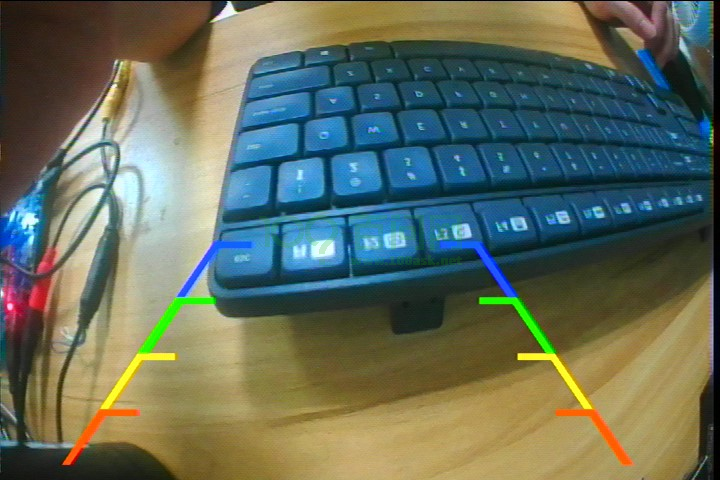
查看图片如下,如果不清楚如何查看图片,请参考:CVBS摄像头抓图 | 东山Π (100ask.org)