使用 Python3 操作 OpenCV
勾选 OpenCV-Python3 包
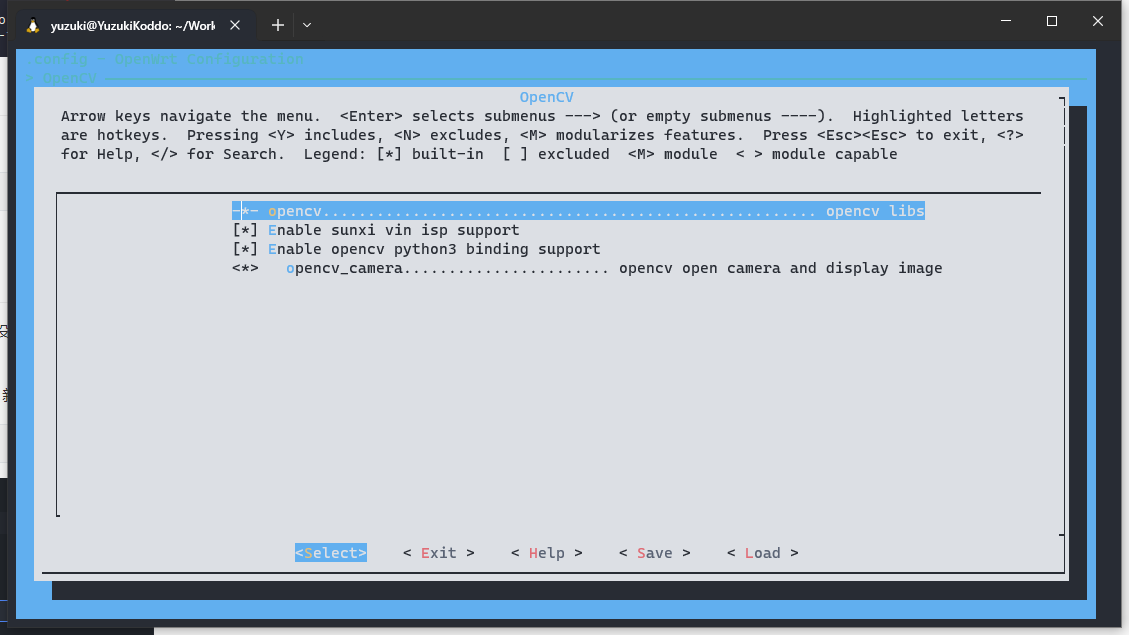
m menuconfig 进入软件包配置,勾选
OpenCV --->
<*> opencv....................................................... opencv libs
[*] Enabel sunxi vin isp support
[*] Enabel opencv python3 binding support
然后编译固件即可,请注意 Python3 编译非常慢,而且需要编译机有16G以上内存,需要耐心等待下。
编写一个 Python 脚本,执行上面的相同操作
import cv2
import numpy as np
DISPLAY_X = 240
DISPLAY_Y = 240
frame_width = 480
frame_height = 480
frame_rate = 30
cap = cv2.VideoCapture(0) # 打开摄像头
if not cap.isOpened():
print("Could not open video device.")
exit(1)
print("Successfully opened video device.")
cap.set(cv2.CAP_PROP_FRAME_WIDTH, frame_width)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, frame_height)
cap.set(cv2.CAP_PROP_FPS, frame_rate)
ofs = open("/dev/fb0", "wb") # 打开帧缓冲区
while True:
ret, frame = cap.read() # 读取一帧图像
if frame.dtype != np.uint8 or frame.ndim != 3:
print("Not 8 bits per pixel and channel.")
elif frame.shape[2] != 3:
print("Not 3 channels.")
else:
frame = cv2.transpose(frame) # 图像转置
frame = cv2.flip(frame, 0) # 图像翻转
frame = cv2.resize(frame, (DISPLAY_X, DISPLAY_Y)) # 改变图像大小
framebuffer_width = DISPLAY_X
_ = open("/sys/class/graphics/fb0/bits_per_pixel", "r")
framebuffer_depth = int(_.read()[:2])
_.close()
frame_size = frame.shape
framebuffer_compat = np.zeros(frame_size, dtype=np.uint8)
if framebuffer_depth == 16:
framebuffer_compat = cv2.cvtColor(frame, cv2.COLOR_BGR2BGR565)
for y in range(frame_size[0]):
ofs.seek(y * framebuffer_width * 2)
ofs.write(framebuffer_compat[y].tobytes())
elif framebuffer_depth == 32:
split_bgr = cv2.split(frame)
split_bgr.append(np.full((frame_size[0], frame_size[1]), 255, dtype=np.uint8))
framebuffer_compat = cv2.merge(split_bgr)
for y in range(frame_size[0]):
ofs.seek(y * framebuffer_width * 4)
ofs.write(framebuffer_compat[y].tobytes())
else:
print("Unsupported depth of framebuffer.")
cap.release()
ofs.close()