TinyVision 使用 SyterKit 启动 Linux 6.7 主线内核
SyterKit
SyterKit 是一个纯裸机框架,用于 TinyVision 或者其他 v851se/v851s/v851s3/v853 等芯片的开发板,SyterKit 使用 CMake 作为构建系统构建,支持多种应用与多种外设驱动。同时 SyterKit 也具有启动引导的功能,可以替代 U-Boot 实现快速启动
获取 SyterKit 源码
SyterKit 源码位于GitHub,可以前往下载。
git clone https://github.com/YuzukiHD/SyterKit.git
从零构建 SyterKit
构建 SyterKit 非常简单,只需要在 Linux 操作系统中安装配置环境即可编译。SyterKit 需要的软件包有:
gcc-arm-none-eabiCMake
对于常用的 Ubuntu 系统,可以通过如下命令安装
sudo apt-get update
sudo apt-get install gcc-arm-none-eabi cmake build-essential -y
然后新建一个文件夹存放编译的输出文件,并且进入这个文件夹
mkdir build
cd build
然后运行命令编译 SyterKit
cmake ..
make
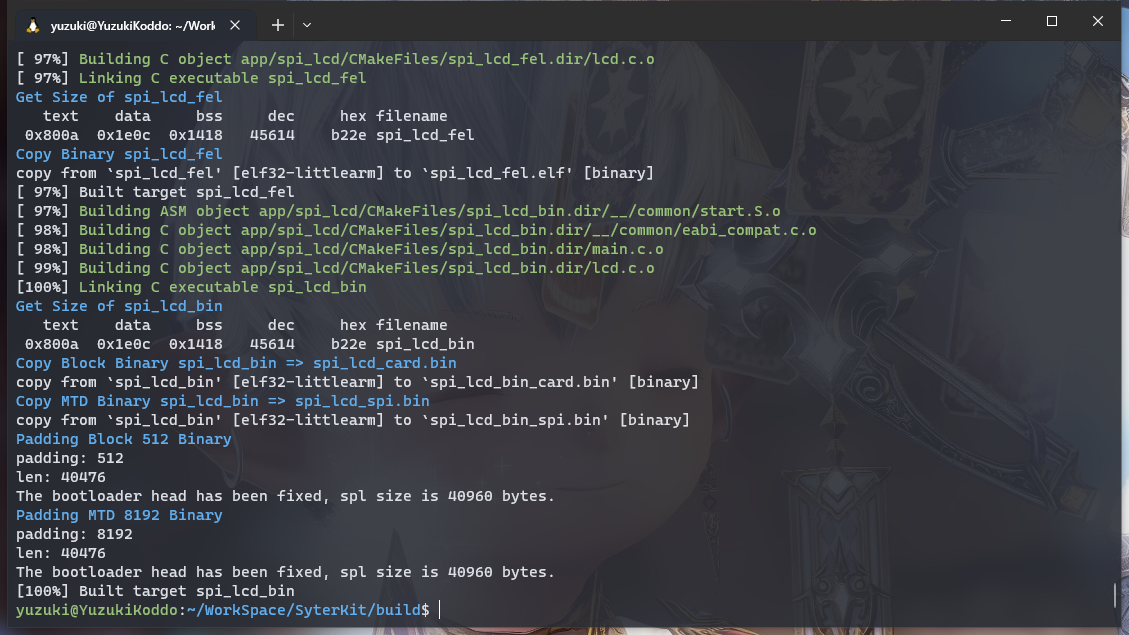
编译后的可执行文件位于 build/app 中,这里包括 SyterKit 的多种APP可供使用。

这里我们使用的是 syter_boot 作为启动引导。进入 syter_boot 文件夹,可以看到这些文件

由于 TinyVision 是 TF 卡启动,所以我们需要用到 syter_boot_bin_card.bin
移�植 Linux 6.7 主线
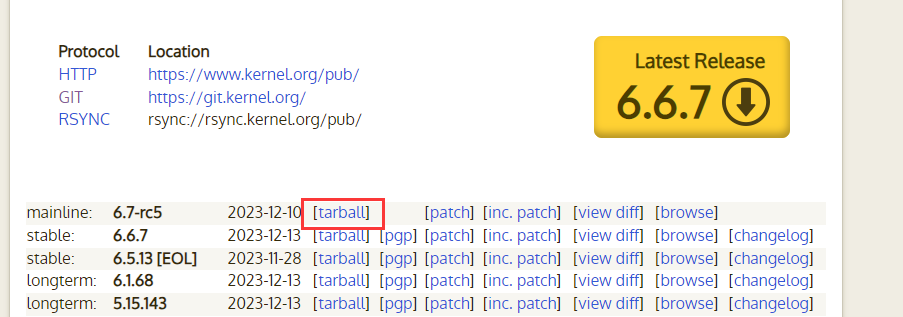
有了启动引导,接下来是移植 Linux 6.7 主线,前往 https://kernel.org/ 找到 Linux 6.7,选择 tarball 下载
下载后解压缩
tar xvf linux-6.7-rc5.tar.gz
进入 linux 6.7 目录,开始移植相关驱动。
搭建 Kernel 相关环境
Kernel 编译需要一些软件包,需要提前安装。
sudo apt-get update && sudo apt-get install -y gcc-arm-none-eabi gcc-arm-linux-gnueabihf g++-arm-linux-gnueabihf build-essential libncurses5-dev zlib1g-dev gawk flex bison quilt libssl-dev xsltproc libxml-parser-perl mercurial bzr ecj cvs unzip lsof
安装完成后可以尝试编译一下,看看能不能编译通过,先应用配置文件
CROSS_COMPILE=arm-linux-gnueabihf- make ARCH=arm sunxi_defconfig
然后尝试编译
CROSS_COMPILE=arm-linux-gnueabihf- make ARCH=arm
可以用 -j32 来加速编译,32 指的是使用32线程编译,一般cpu有几个核心就设置几线程
CROSS_COMPILE=arm-linux-gnueabihf- make ARCH=arm -j32
正常编译
移植 clk 驱动
这里提供已经适配修改后的驱动:https://github.com/YuzukiHD/TinyVision/tree/main/kernel/linux-6.7-driver 可以直接使用。
也可以参考 https://github.com/YuzukiHD/TinyVision/tree/main/kernel/bsp/drivers/clk 中的驱动移植。
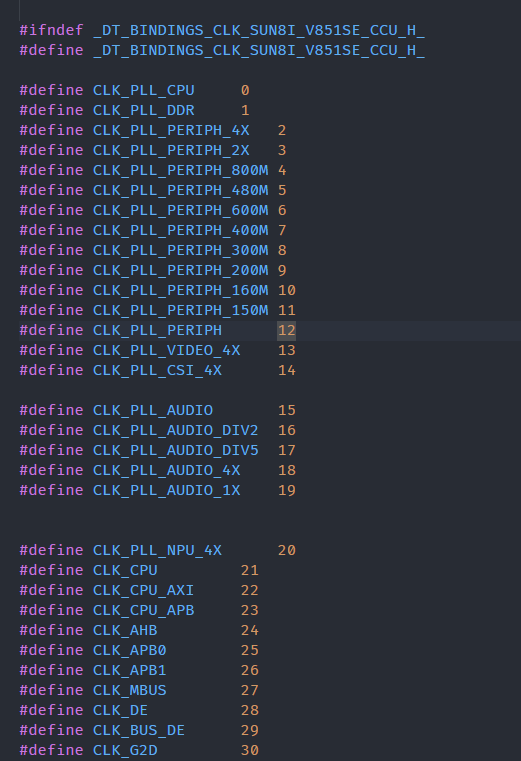
进入文件夹 include/dt-bindings/clock/ 新建文件 sun8i-v851se-ccu.h ,将 CLK 填入
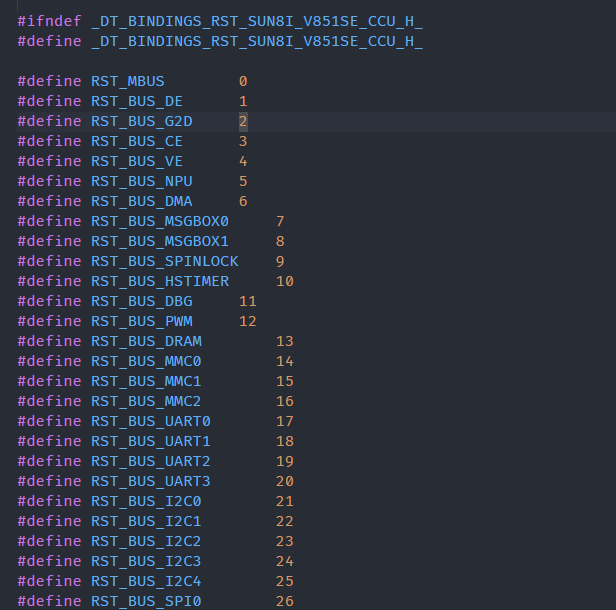
进入 include/dt-bindings/reset 新建文件 sun8i-v851se-ccu.h 将 RST 填入
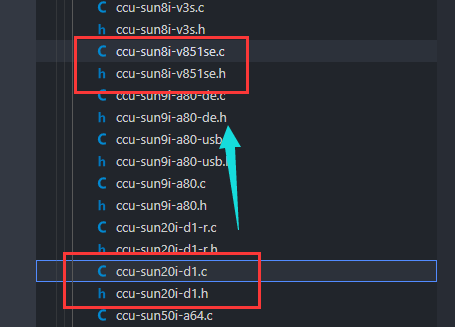
进入 drivers/clk/sunxi-ng 找到 sunxi-ng clk 驱动,复制文件ccu-sun20i-d1.c 和 ccu-sun20i-d1.h 文件并改名为 ccu-sun8i-v851se.c ,ccu-sun8i-v851se.h 作为模板。
将文件中的 SUN20I_D1 改为 SUN8I_V851SE
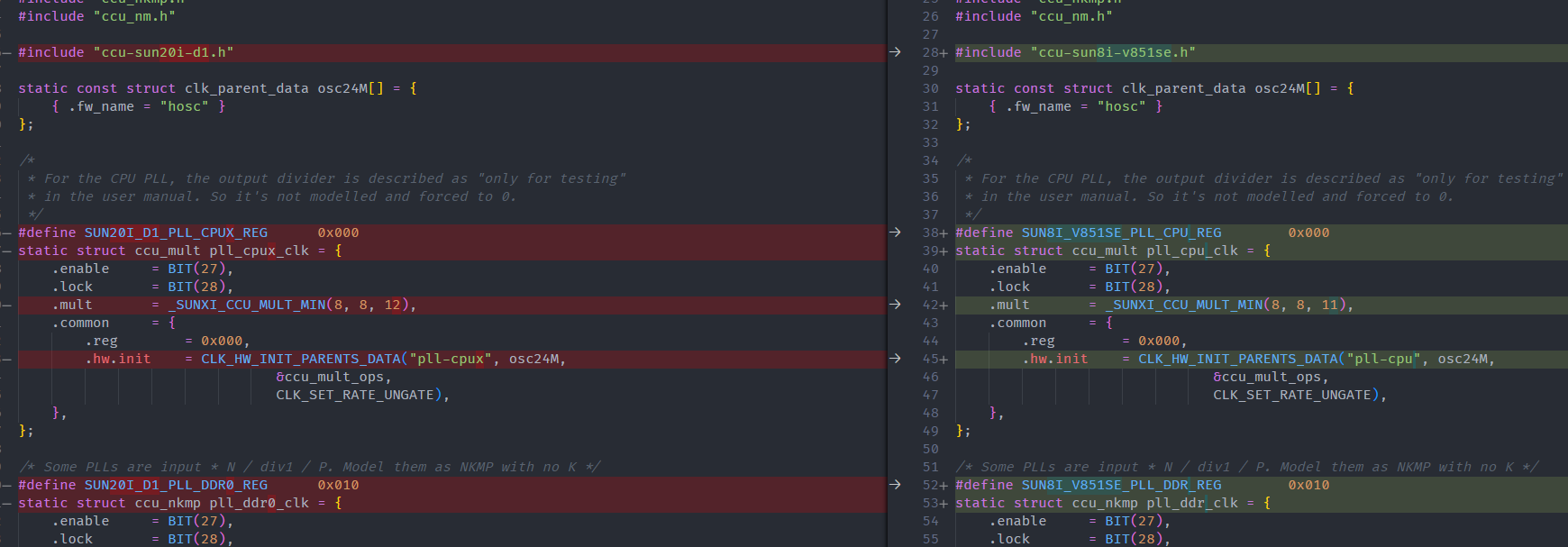
打开芯片数据手册V851SX_Datasheet_V1.2.pdf,找到 CCU 章节
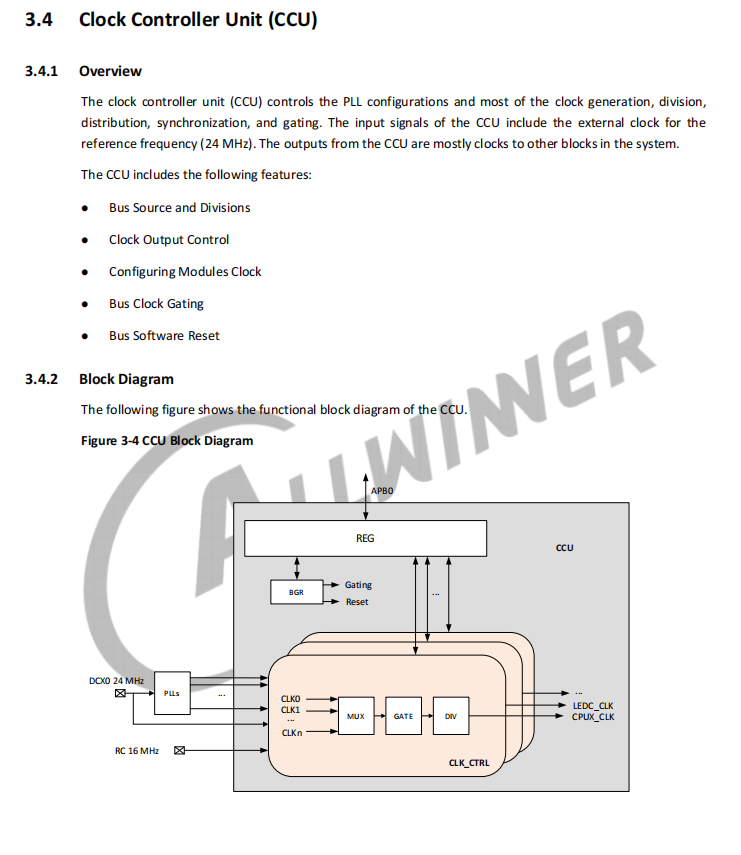
对照手册编写驱动文件适配 V851se 平台。
然后找到 drivers/clk/sunxi-ng/Kconfig 文件,增加刚才编写的驱动的 Kconfig 说明
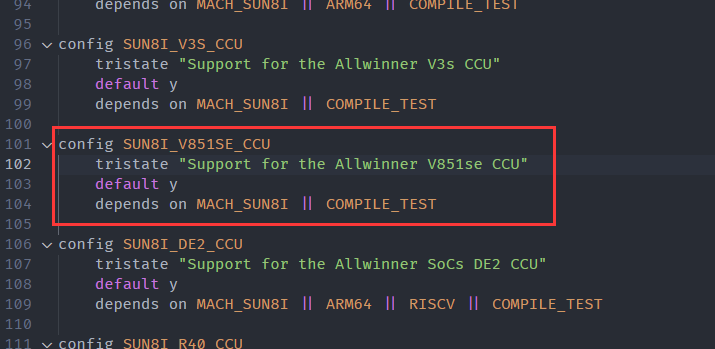
config SUN8I_V851SE_CCU
tristate "Support for the Allwinner V851se CCU"
default y
depends on MACH_SUN8I || COMPILE_TEST
同时打开 drivers/clk/sunxi-ng/Makefile
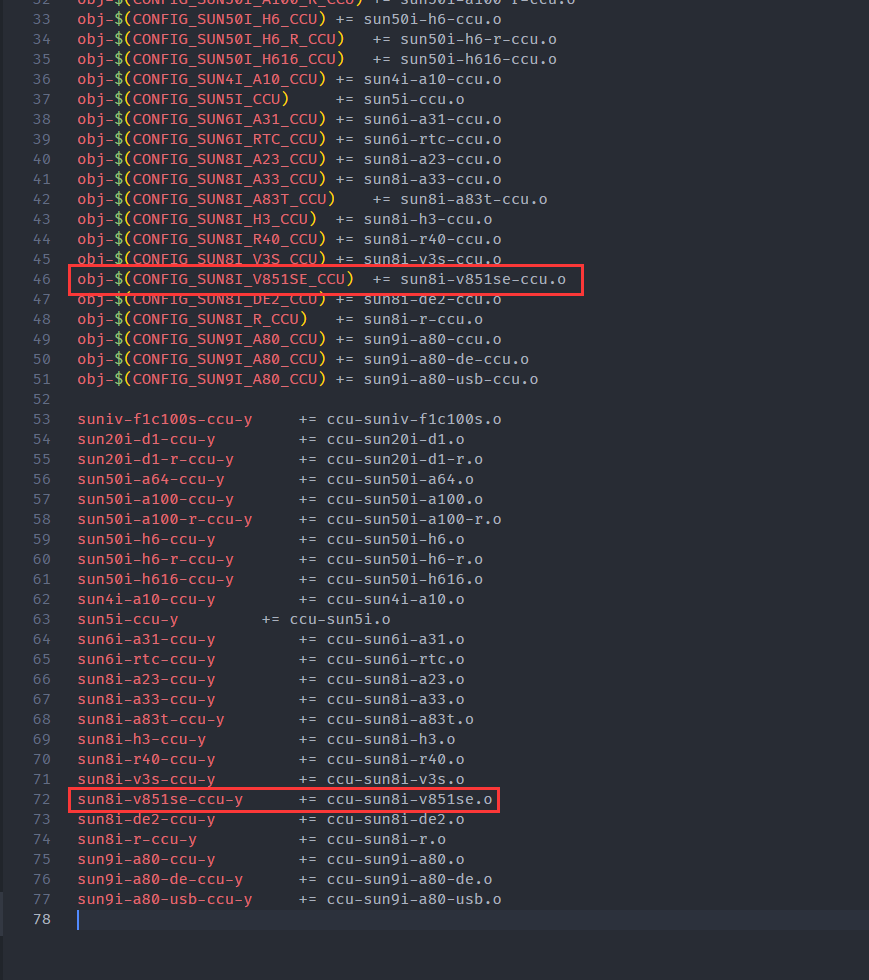
obj-$(CONFIG_SUN8I_V851SE_CCU) += sun8i-v851se-ccu.o
sun8i-v851se-ccu-y += ccu-sun8i-v851se.o
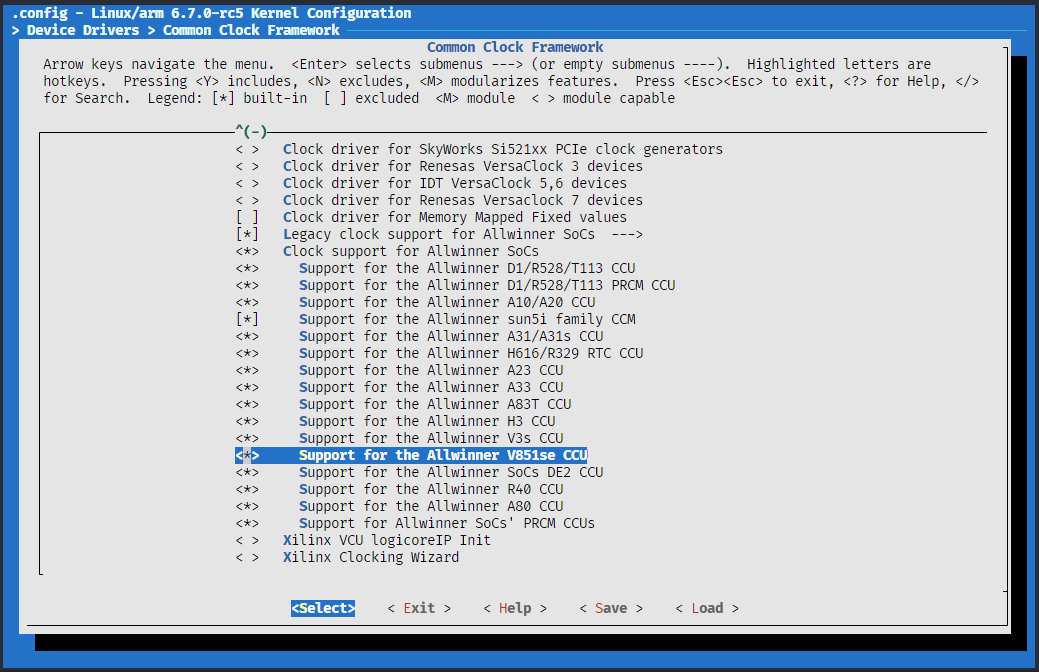
来检查一下是否移植成功,先查看 menuconfig,找到 Device Drivers > Common Clock Framework,查看是否有 V851se 平台选项出现
CROSS_COMPILE=arm-linux-gnueabihf- make ARCH=arm menuconfig
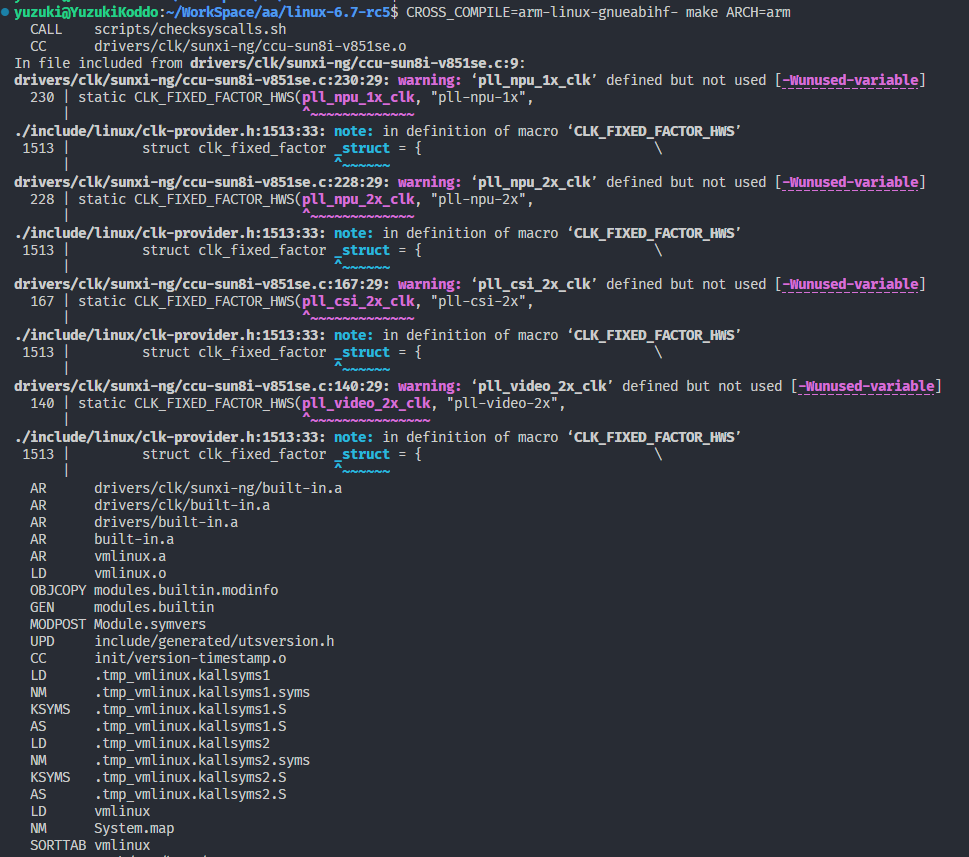
编译测试,有几处未使用的变量的警告,无视即可。
CROSS_COMPILE=arm-linux-gnueabihf- make ARCH=arm
正常编译成功
移植 pinctrl 驱动
这里提供已经适配修改后的驱动:https://github.com/YuzukiHD/TinyVision/tree/main/kernel/linux-6.7-driver 可以直接使用。
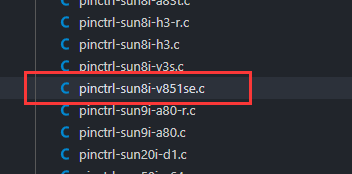
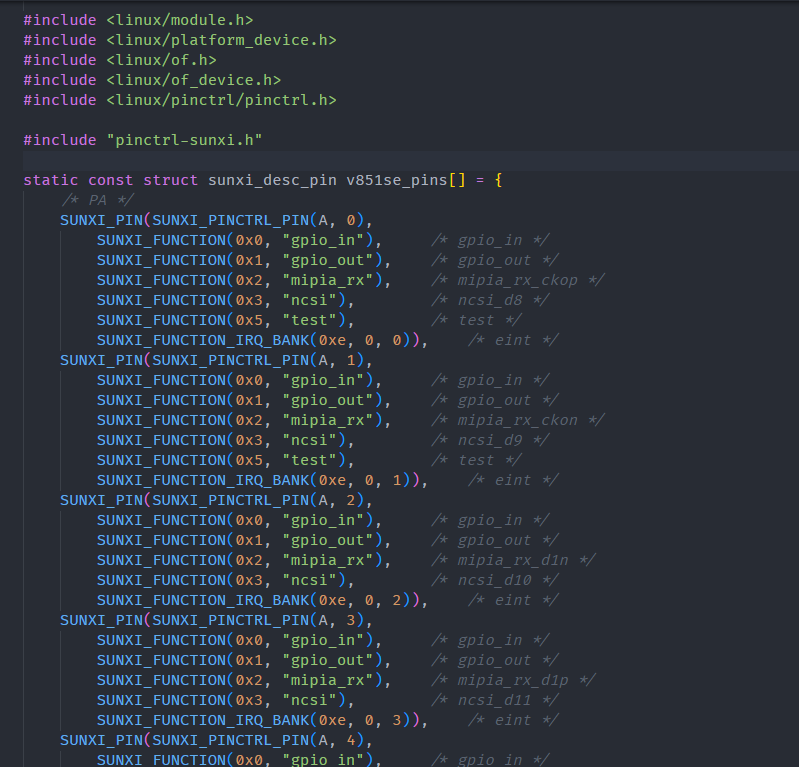
前往drivers/pinctrl/sunxi/ 新建文件 pinctrl-sun8i-v851se.c
打开 V851SE_PINOUT_V1.0.xlsx 对照填入PIN的值与功能。
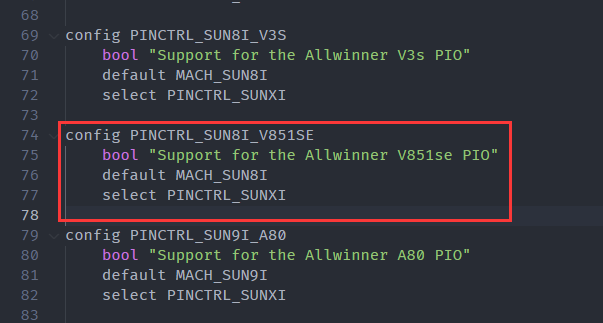
同样的,修改 drivers/pinctrl/sunxi/Kconfig 增加选项
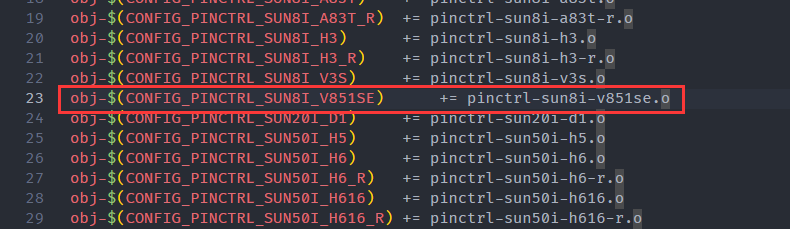
修改 drivers/pinctrl/sunxi/Makefile 增加路径
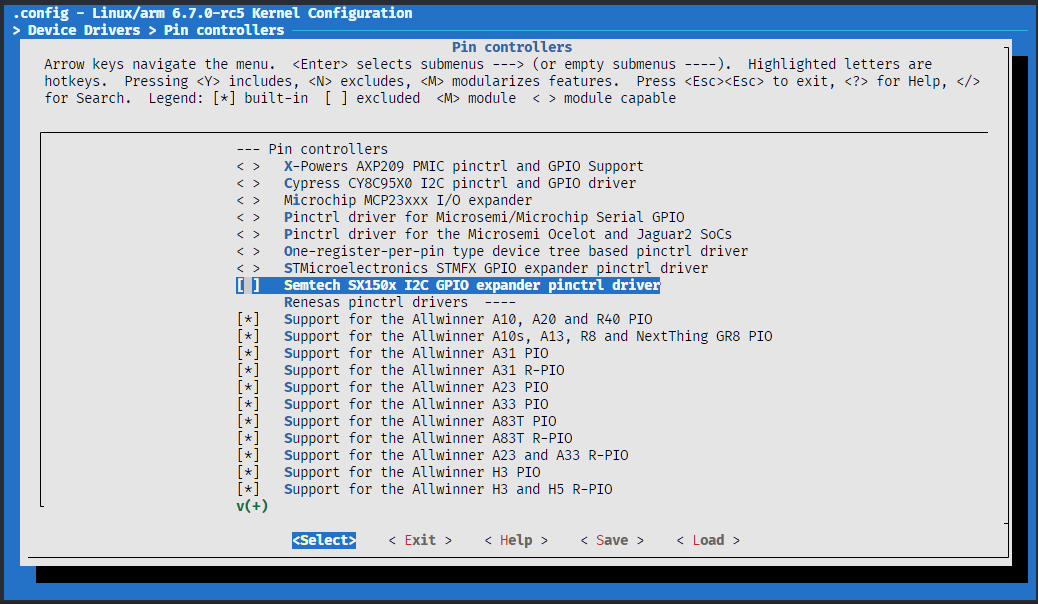
来检查一下是否移植成功,先查看 menuconfig,找到 > Device Drivers > Pin controllers,查看是否有 V851se 平台选项出现
CROSS_COMPILE=arm-linux-gnueabihf- make ARCH=arm menuconfig
编译测试,编译通过
CROSS_COMPILE=arm-linux-gnueabihf- make ARCH=arm
编写设备树
这里提供已经适配修改后的驱动:https://github.com/YuzukiHD/TinyVision/tree/main/kernel/linux-6.7-driver/dts 可以直接使用。
这部分直接给结果了,把上面适配的设备树放到/home/yuzuki/WorkSpace/aa/linux-6.7-rc5/arch/arm/boot/dts/allwinner/ ,修改 /home/yuzuki/WorkSpace/aa/linux-6.7-rc5/arch/arm/boot/dts/allwinner/Makefile
sun8i-v851se-tinyvision.dtb

生成刷机镜像
编译内核后,可以在文件夹 arch/arm/boot/dts/allwinner 生成sun8i-v851se-tinyvision.dtb ,在文件夹arch/arm/boot 生成 zImage ,把他们拷贝出来。
然后将 sun8i-v851se-tinyvision.dtb 改名为 sunxi.dtb ,这个设备树名称是定义在 SyterKit 源码中的,如果之前修改了 SyterKit 的源码需要修改到对应的名称,SyterKit 会去读取这个设备树。
然后编写一个 config.txt 作为配置文件
[configs]
bootargs=cma=4M root=/dev/mmcblk0p2 init=/sbin/init console=ttyS0,115200 earlyprintk=sunxi-uart,0x02500000 rootwait clk_ignore_unused
mac_addr=4a:13:e4:f9:79:75
bootdelay=3
安装 genimage
这里我们使用 genimage 作为打包工具
sudo apt-get install libconfuse-dev #安装genimage依赖库
sudo apt-get install genext2fs # 制作镜像时genimage将会用到
git clone https://github.com/pengutronix/genimage.git
cd genimage
./autogen.sh # 配置生成configure
./configure # 配置生成makefile
make
sudo make install
编译后运行试一试,这里正常

使用 genimage 打包固件
编写 genimage.cfg 作为打包的配置
image boot.vfat {
vfat {
files = {
"zImage",
"sunxi.dtb",
"config.txt"
}
}
size = 8M
}
image sdcard.img {
hdimage {}
partition boot0 {
in-partition-table = "no"
image = "syter_boot_bin_card.bin"
offset = 8K
}
partition boot0-gpt {
in-partition-table = "no"
image = "syter_boot_bin_card.bin"
offset = 128K
}
partition kernel {
partition-type = 0xC
bootable = "true"
image = "boot.vfat"
}
}
由于genimage的脚本比较复杂,所以编写一个 genimage.sh 作为简易使用的工具
#!/usr/bin/env bash
die() {
cat <<EOF >&2
Error: $@
Usage: ${0} -c GENIMAGE_CONFIG_FILE
EOF
exit 1
}
# Parse arguments and put into argument list of the script
opts="$(getopt -n "${0##*/}" -o c: -- "$@")" || exit $?
eval set -- "$opts"
GENIMAGE_TMP="${BUILD_DIR}/genimage.tmp"
while true ; do
case "$1" in
-c)
GENIMAGE_CFG="${2}";
shift 2 ;;
--) # Discard all non-option parameters
shift 1;
break ;;
*)
die "unknown option '${1}'" ;;
esac
done
[ -n "${GENIMAGE_CFG}" ] || die "Missing argument"
# Pass an empty rootpath. genimage makes a full copy of the given rootpath to
# ${GENIMAGE_TMP}/root so passing TARGET_DIR would be a waste of time and disk
# space. We don't rely on genimage to build the rootfs image, just to insert a
# pre-built one in the disk image.
trap 'rm -rf "${ROOTPATH_TMP}"' EXIT
ROOTPATH_TMP="$(mktemp -d)"
GENIMAGE_TMP="$(mktemp -d)"
rm -rf "${GENIMAGE_TMP}"
genimage \
--rootpath "${ROOTPATH_TMP}" \
--tmppath "${GENIMAGE_TMP}" \
--inputpath "${BINARIES_DIR}" \
--outputpath "${BINARIES_DIR}" \
--config "${GENIMAGE_CFG}"
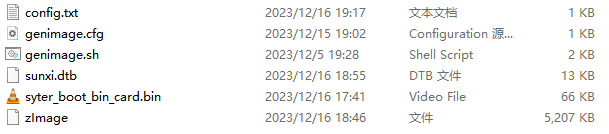
准备完成,文件如下所示
运行命令进行打包
chmod 777 genimage.sh
./genimage.sh -c genimage.cfg
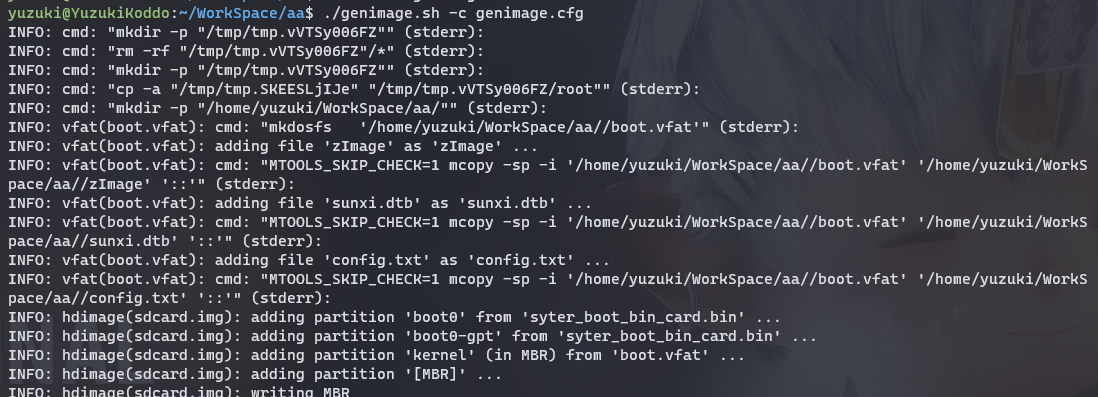
打包完成,可以找到 sdcard.img
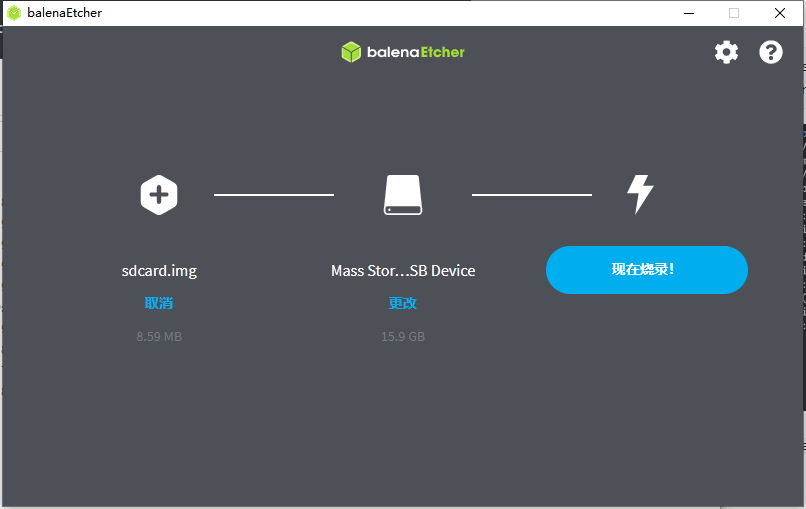
使用软件烧录固件到TF卡上
测试
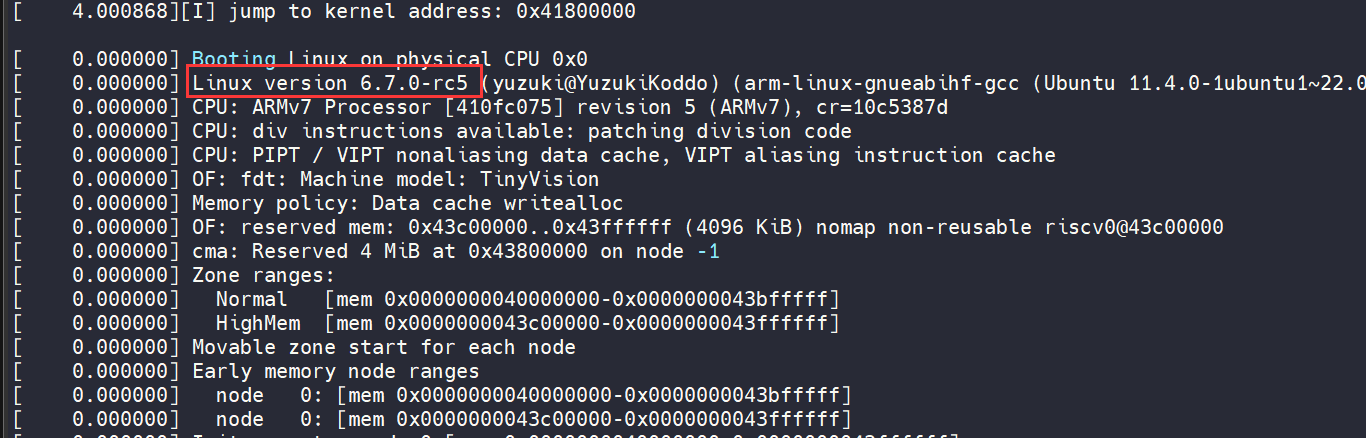
插卡,上电,成功启动系统
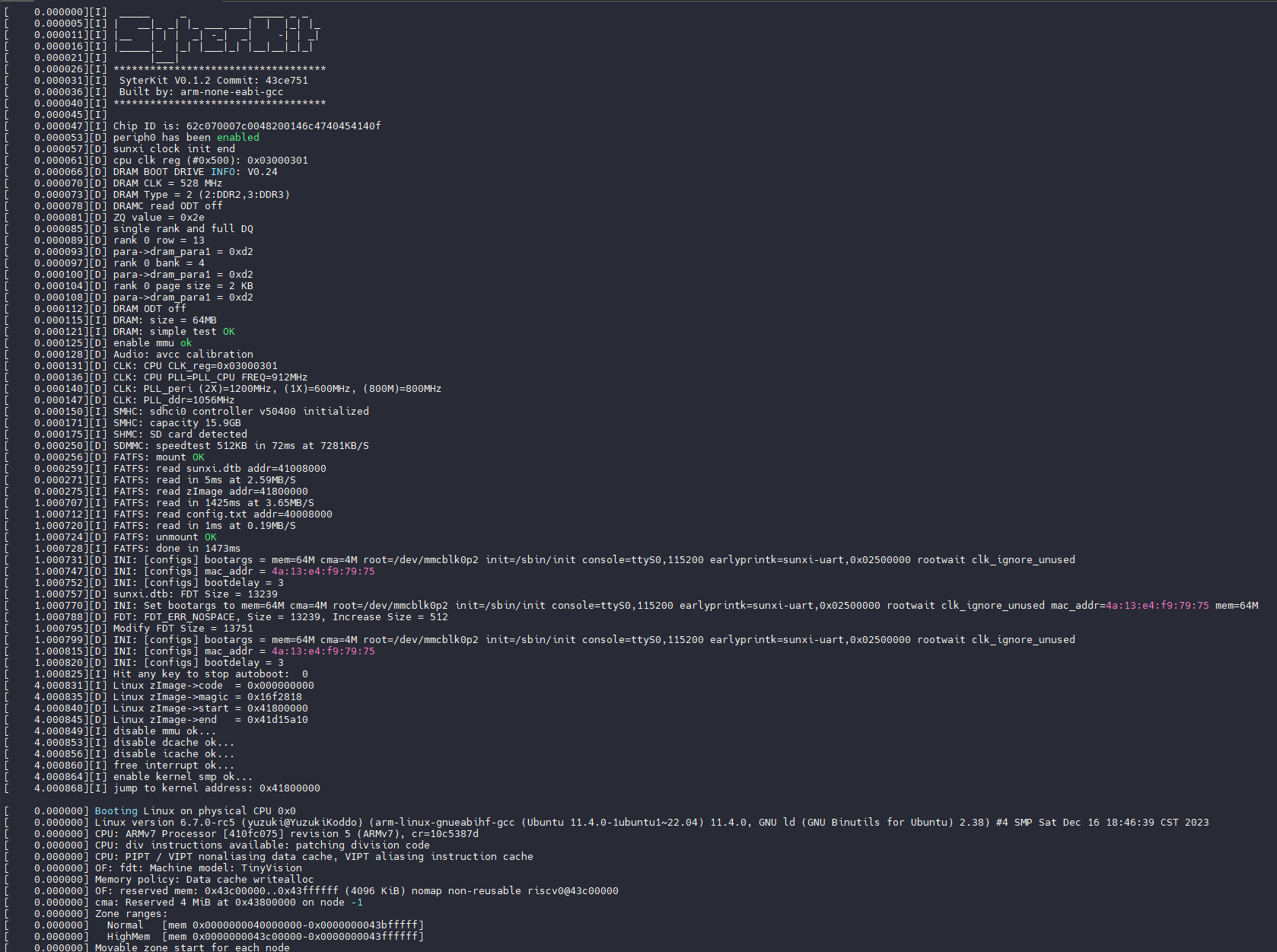
可以看到 Linux 版本是 6.7.0