CAN通信
本章节将讲解如何测试 T113s3-SDNAND 开发板的CAN通信功能。
准备工作
在进入本章节实验之前,请做好以下准备。
硬件:
- T113s3-SDNAND 开发板
- usb typeC线 X2
软件:
- 全志线刷工具:AllwinnertechPhoeniSuit.zip
- 全志USB烧录驱动:AllwinnerUSBFlashDeviceDriver.zip
- 镜像:T113s3-SDNAND-Support-CAN.7z
镜像说明:支持CAN功能,不支持RGB触摸功能,md5值:0df6410466e823b89e30a0e2c517488e
CAN通信协议概述
CAN通信协议,全称为Controller Area Network,是一种支持实时控制的串行通信协议,它专为满足汽车和工业环境中的高可靠性和网络灵活性而设计。以下是简要的概述:
- CAN协议由Bosch公司在1980年代开发,主要用于汽车电子系统中的电子控制单元(ECUs)之间的通信。
- CAN使用多主站模式,网络上的任何节点都可以在任何时间点开始发送数据。
- 它采用非破坏性仲裁机制,确保高优先级的消息能够优先传输。
- CAN协议的数据帧结构紧凑,包括帧起始、仲裁场、控制场、数据场、CRC校验、帧结束等部分。
- 支持最高8个字节的数据载荷,适用于传输控制命令和传感器数据。
- 集成了强大的错误检测机制,包括循环冗余校验(CRC)和位填充。
- 在检测到错误时,网络可以自动重传损坏的消息,提高了数据传输的可靠性。
- CAN网络支持不同的波特率,从最低的10kbps到最高的1Mbps,根据不同的应用需求进行配置。
硬件连接
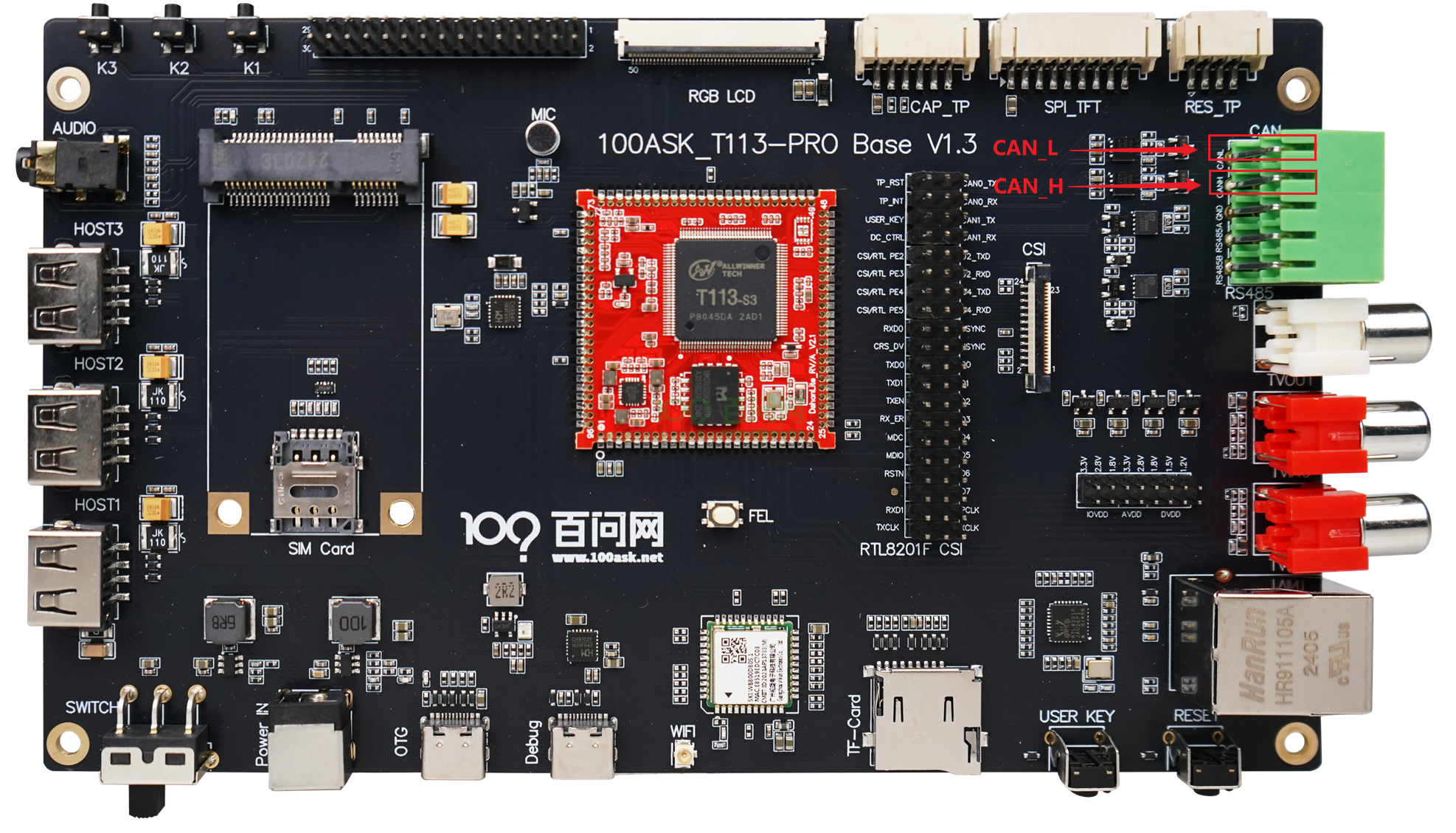
在进行CAN功能测试前,需要使用两根接线端子(杜邦线)连接开发板的CAN接口,CAN0_L连接 CAN1_L,CAN0_H连接 CAN1_H。硬件连接如下图:
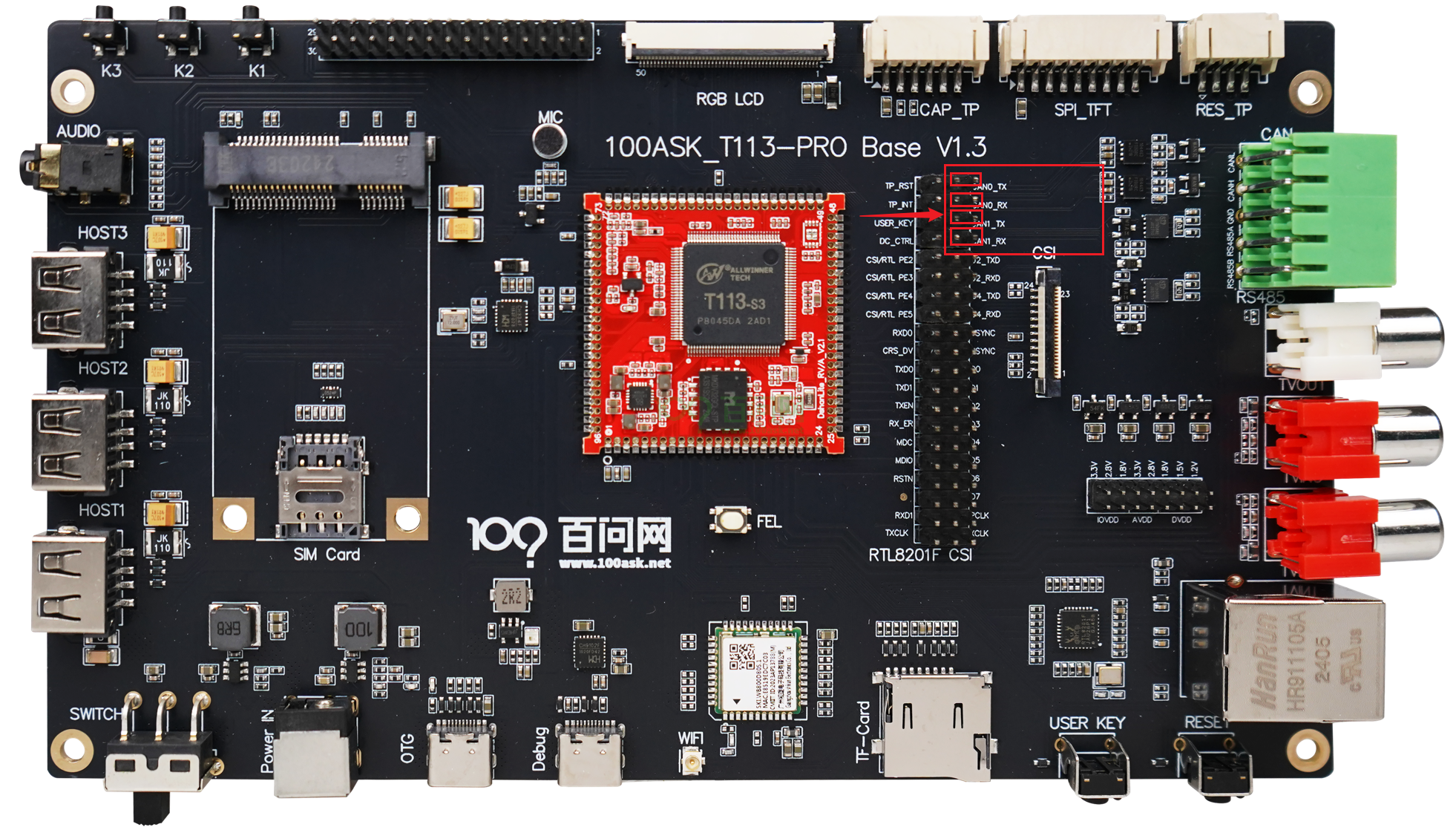
注意,这个四根引脚与USER_KET、RGB屏幕的触摸和SPI_TFT的引脚是共用的,我们需要使用卡槽把排针中间的引脚连接到右边的引脚上,这个时候可以使用CAN功能,但是与该引脚共用的其他功能是使用不了的,如下,
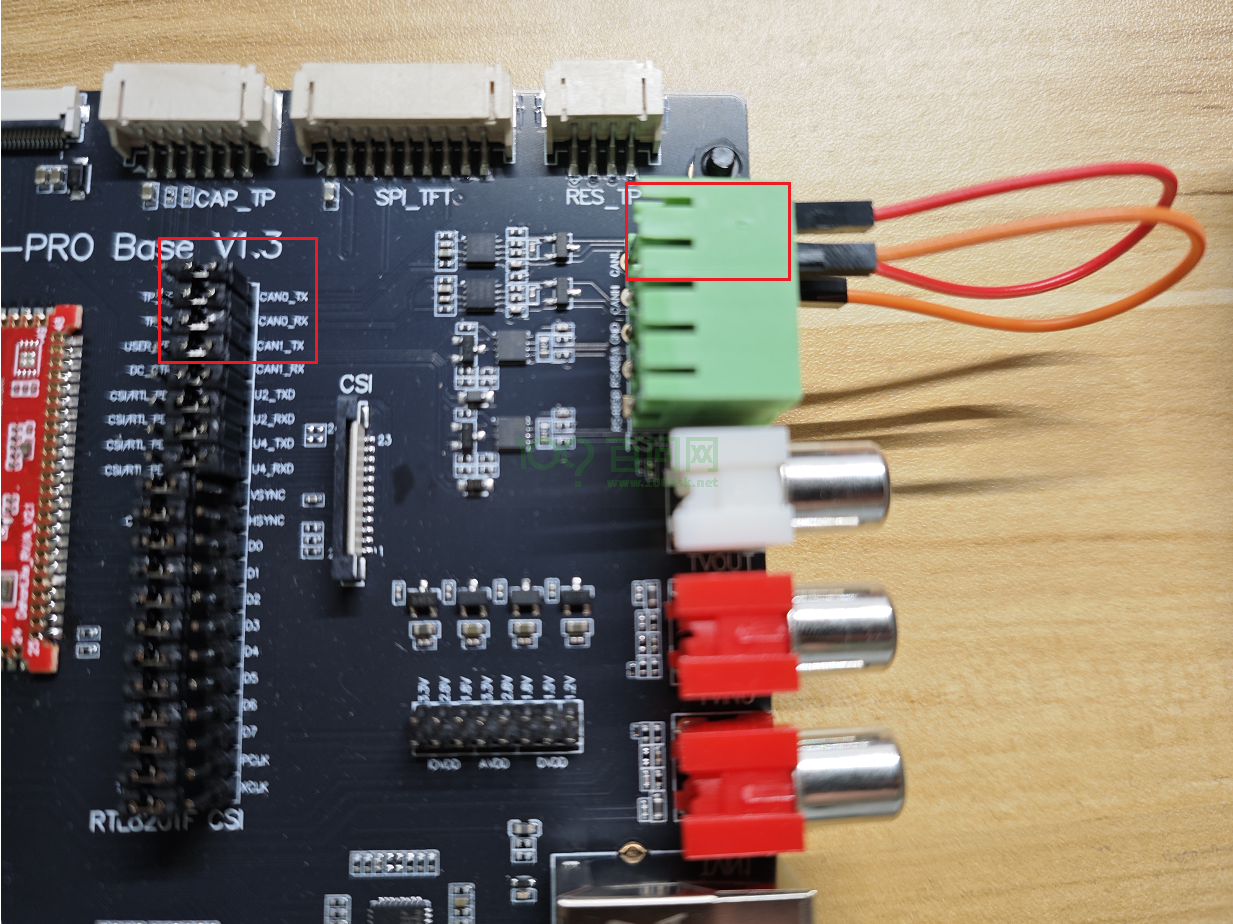
实际连接图如下,
登录串口终端
连接成功后,如果不清楚如何连接开发板登录串口,请参考 快速启动 中的《启动开发板》章节。
启用CAN接口
打开串口终端,执行ifconfig -a,可以看到存在 awlink0 和 awlink1 节点,
# ifconfig -a
awlink0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
NOARP MTU:16 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:10
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
Interrupt:2
awlink1 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
NOARP MTU:16 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:10
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
Interrupt:3
ip6tnl0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
NOARP MTU:1452 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
lo Link encap:Local Loopback
inet addr:127.0.0.1 Mask:255.0.0.0
inet6 addr: ::1/128 Scope:Host
UP LOOPBACK RUNNING MTU:65536 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
sit0 Link encap:IPv6-in-IPv4
NOARP MTU:1480 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
启用CAN接口,需要先设置波特率,执行以下指令,
# ip link set awlink0 type can bitrate 500000
# ip link set awlink1 type can bitrate 500000
设置完成后,启用CAN接口,
# ifconfig awlink0 up
[ 1105.138598] IPv6: ADDRCONF(NETDEV_CHANGE): awlink0: link becomes ready
# ifconfig awlink1 up
[ 1106.368692] IPv6: ADDRCONF(NETDEV_CHANGE): awlink1: link becomes ready
#
测试CAN通信
启用CAN接口之后,接下来进行两个CAN接口的通信测试。
设置awlink0接收数据
# candump awlink0 &
[1] 1386
向awlink0发送数据
下面cansend命令中,5A1是帧ID,**"#"**后面的“11.22.33.44.55.66.77.88”是要发送的数据,十六进制。CAN2.0一次最多发送8个字节的数据,8字节数据之间用英文点号“.”隔开,can-utils会对数据进行解析。
# cansend awlink0 5A1#11.22.33.44.55.66.77.88
awlink0 5A1 [8] 11 22 33 44 55 66 77 88